
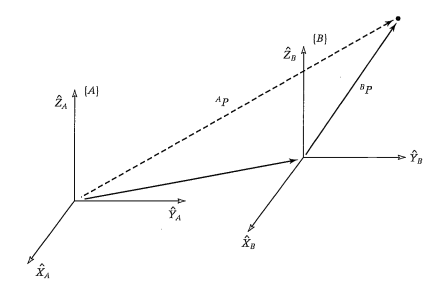
Пересчет координат вектора при переходе из одной системы координат в другую.
Нужно пересчитать координаты вектора при переходе из одной системы координат в другую. Нам заданы матрицы трансформации в виде вектора — переноса начала координат и углов поворота относительно осей.
Исходные данные:
- Вектор в исходной системе координат: (x, y, z) (предположим, что это вектор-столбец)
- Вектор переноса начала координат (translation vector): (Tx, Ty, Tz) - задает смещение нового начала координат относительно старого
- Углы поворота (rotation angles): α (вокруг оси X), β (вокруг оси Y), γ (вокруг оси Z) (ZYX порядок поворотов)
(Важно! Порядок поворотов имеет значение).
Шаги для пересчета координат:
-
Поворот (Rotation):
Сначала необходимо повернуть вектор (x, y, z) в соответствии с углами поворота. Для этого необходимо создать матрицу поворота (Rotation Matrix).
Матрица поворота вокруг оси X (Rx):
\(\begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos(\alpha) & -\sin(\alpha) \\ 0 & \sin(\alpha) & \cos(\alpha) \end{bmatrix}\)Матрица поворота вокруг оси Y (Ry):
\(\begin{bmatrix} \cos(\beta) & 0 & \sin(\beta) \\ 0 & 1 & 0 \\ -\sin(\beta) & 0 & \cos(\beta) \end{bmatrix}\)Матрица поворота вокруг оси Z (Rz):
\(\begin{bmatrix} \cos(\gamma) & -\sin(\gamma) & 0 \\ \sin(\gamma) & \cos(\gamma) & 0 \\ 0 & 0 & 1 \end{bmatrix}\)Общая матрица поворота R (ZYX): R = Rz * Ry * Rx
"Повернутый" вектор:
$$ \textit{v_rotated} = R*(x, y, z) $$
-
Перенос (Translation):
После поворота необходимо учесть перенос начала координат. Вектор (Tx, Ty, Tz) указывает смещение нового начала координат относительно старого.
$$ \textit{v_new} = \textit{v_rotated} - (Tx, Ty, Tz)$$
![]()
Итого, что мы должны сделать:
Порядок расчетов:
- Рассчитываем матрицы поворотов по осям:
- Rx:
\(\begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos(\alpha) & -\sin(\alpha) \\ 0 & \sin(\alpha) & \cos(\alpha) \end{bmatrix}\)
- Ry:
\(\begin{bmatrix} \cos(\beta) & 0 & \sin(\beta) \\ 0 & 1 & 0 \\ -\sin(\beta) & 0 & \cos(\beta) \end{bmatrix}\)
- Rz:
\(\begin{bmatrix} \cos(\gamma) & -\sin(\gamma) & 0 \\ \sin(\gamma) & \cos(\gamma) & 0 \\ 0 & 0 & 1 \end{bmatrix}\)
- Rx:
- Рассчитываем общую матрицу поворота: R = Rz * Ry * Rx
- Поворачиваем вектор (находим его координаты если бы при этом он оставался в текущей системе координат): v_rotated = R * [x, y, z]
- Переносим координаты повернутого вектора с поправкой на то, что начало координат также изменилось: v_new = v_rotated - [Tx, Ty, Tz]
Пример на Python (используем NumPy):
import numpy as np
import math
def transform_coordinates(x, y, z, Tx, Ty, Tz, alpha_deg, beta_deg, gamma_deg):
"""
Пересчитывает координаты вектора из одной системы координат в другую.
Args:
x, y, z: Координаты вектора в исходной системе координат.
Tx, Ty, Tz: Вектор переноса начала координат.
alpha_deg, beta_deg, gamma_deg: Углы поворота в градусах (ZYX порядок).
Returns:
(x_new, y_new, z_new): Координаты вектора в новой системе координат.
"""
# Преобразуем углы в радианы
alpha = math.radians(alpha_deg)
beta = math.radians(beta_deg)
gamma = math.radians(gamma_deg)
# Матрицы поворотов
Rx = np.array([[1, 0, 0],
[0, math.cos(alpha), -math.sin(alpha)],
[0, math.sin(alpha), math.cos(alpha)]])
Ry = np.array([[math.cos(beta), 0, math.sin(beta)],
[0, 1, 0],
[-math.sin(beta), 0, math.cos(beta)]])
Rz = np.array([[math.cos(gamma), -math.sin(gamma), 0],
[math.sin(gamma), math.cos(gamma), 0],
[0, 0, 1]])
# Общая матрица поворота (ZYX)
R = Rz @ Ry @ Rx
# Преобразуем исходный вектор в вектор-столбец
v_original = np.array([x, y, z])
# Поворачиваем вектор
v_rotated = R @ v_original
# Переносим вектор
v_new = v_rotated - np.array([Tx, Ty, Tz])
return tuple(v_new)
# Пример использования:
x = 2
y = 3
z = 4
Tx = 1
Ty = 2
Tz = 3
alpha_deg = 30 # Угол поворота вокруг X (в градусах)
beta_deg = 45 # Угол поворота вокруг Y (в градусах)
gamma_deg = 60 # Угол поворота вокруг Z (в градусах)
x_new, y_new, z_new = transform_coordinates(x, y, z, Tx, Ty, Tz, alpha_deg, beta_deg, gamma_deg)
print(f"Исходные координаты: ({x}, {y}, {z})")
print(f"Новые координаты: ({x_new:.2f}, {y_new:.2f}, {z_new:.2f})")
На выходе получим новые координаты вектора:
Исходные координаты: (2, 3, 4) Новые координаты: (0.94, 2.56, -0.90)