")
Betaflight | Вкладка Configuration (Конфигурация)
27 июля 2025Вкладка Configuration (Конфигурация) в Betaflight — это основной раздел, где настраивается большинство параметров вашего полётного контроллера.
Позволяет:
-
Задать частоты работы гироскопа и цикла PID — это определяет, как часто контроллер получает данные от гироскопа и как часто рассчитывает управляющие воздействия для стабилизации и управления дроном.
-
Включить дополнительные датчики, которые не были активированы во вкладке Ports, например акселерометр, барометр или магнитометр.
-
Откорректировать работу акселерометра (триммирование), если он включён.
-
Настроить угол камеры для FPV-режимов и искусственного горизонта (если выбран акселерометр).
-
Ограничить угол наклона для взведения моторов (arming), чтобы предотвратить запуск дрона в опасном положении. Можно отключить этот лимит, установив 180 градусов, чтобы разрешить взведение в любом положении — полезно для функции flip over after crash1.
Обычно рекомендуется выставлять частоту цикла PID равной частоте гироскопа или половине этой частоты, если у вас медленный процессор и высокая частота гироскопа (например, 8 кГц для гироскопа — 4 кГц для цикла PID на F411).
Также в этой вкладке можно включить или отключить:
- Акселерометр — используется для функций самостабилизации. Его можно включить или отключить в настройках.
- Барометр — если установлен, используется для измерения высоты. Можно включить или отключить.
- Магнитометр — при наличии помогает определить ориентацию относительно сторон света. Также можно включить или отключить.
Всё это позволяет гибко настроить поведение и функционал вашего квадрокоптера под конкретные задачи и оборудование.
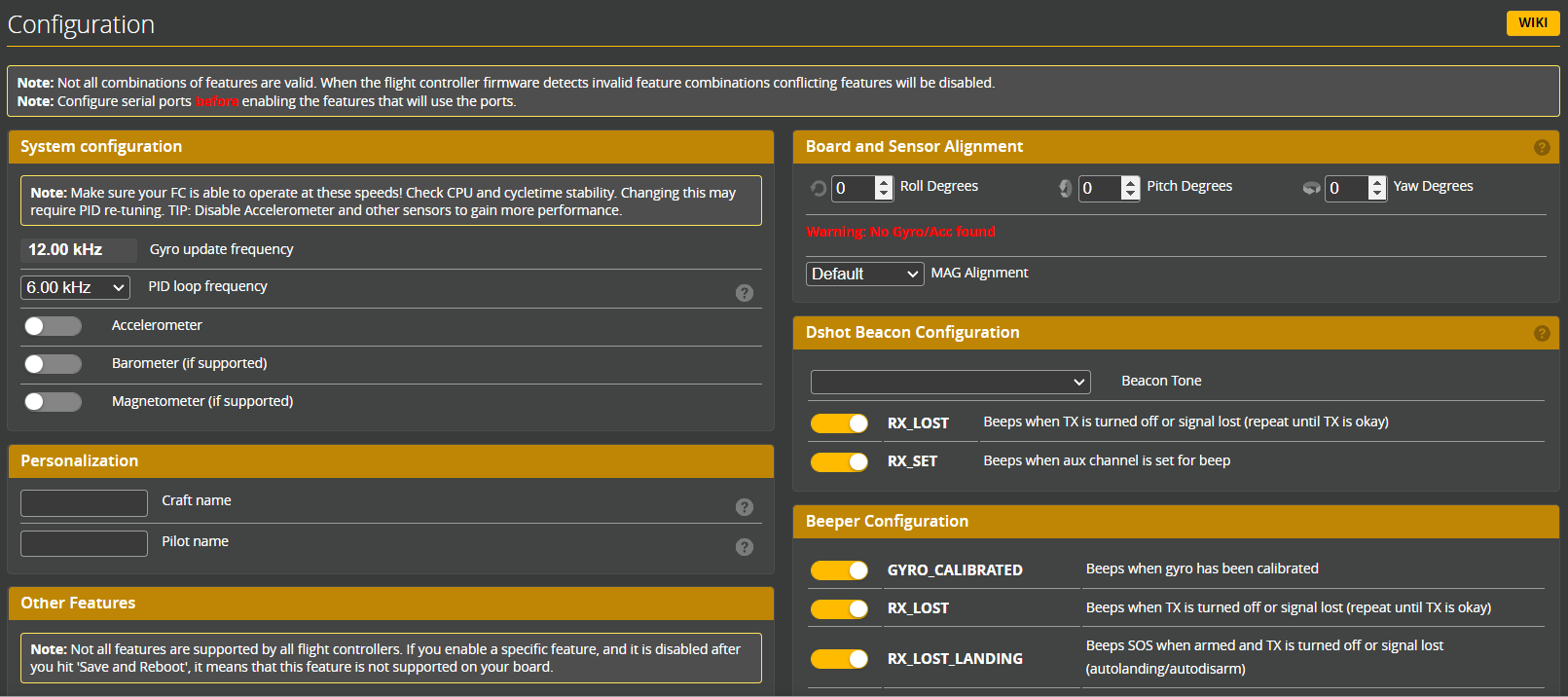
⇒ системные настройки | блок
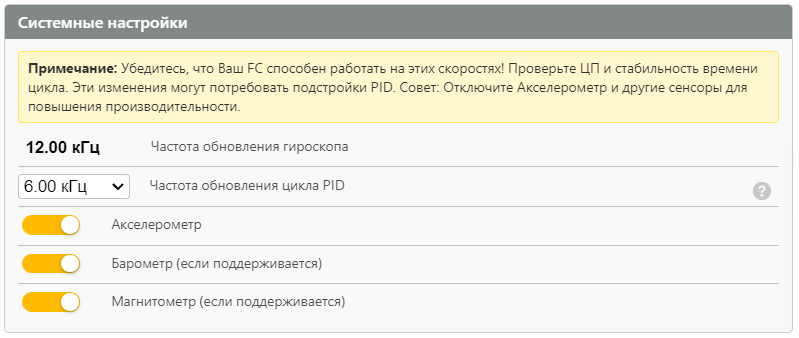
Частота обновления гироскопа
Это частота, с которой производится опрос гироскопа. В большинстве современных версий Betaflight она по умолчанию устанавливается и фиксируется на частоте, при которой гироскоп работает оптимально (8 кГц для MPU6000, 3,2 кГц для BMI270 и т.д.).
Частота обновления цикла PID
Это частота, с которой выполняются вычисления цикла PID — то есть все математические операции, связанные с управлением полётом. Например, при использовании dshot300 вы можете заметить, что если вручную установить частоту цикла PID 8 кГц, она автоматически сбросится на 4 кГц, потому что dshot300 не передаёт обновления достаточно быстро для использования 8 кГц, и поэтому выбирается 4 кГц для экономии ресурсов процессора.
Рекомендуемые сочетания частоты цикла PID и частоты вывода на моторы (при включённом RPM-фильтре):
-
2 кГц / dshot150
-
4 кГц / dshot300
-
8 кГц / dshot600
Исключение — при использовании гироскопа BMI270, в этом случае рекомендуемые частоты: 3,2 кГц / 1,6 кГц.
Обычно рекомендуется устанавливать частоту цикла PID равной частоте обновления гироскопа или половине этой частоты, если у вас более медленный микроконтроллер и высокая частота гироскопа (например, при гироскопе 8 кГц на контроллере F411 PID-цикл лучше ставить 4 кГц)
Частота PID-цикла не должна быть выше частоты обновления гироскопа, иначе PID будет работать с устаревшими данными, что ухудшит управление. Аналогично, если PID-цикл ниже, часть данных гироскопа будет пропущена
В новых версиях Betaflight для слабых контроллеров (например, F411, F405) частота PID-цикла часто фиксируется на 4 кГц для оптимальной работы и снижения нагрузки на CPU
⇒ Триммирование акселерометра / Accelerometer Trim | блок

Настройка компенсации ошибок в показаниях акселерометра. Она доступна только при включённом акселерометре и позволяет подстроить датчик для более точного определения положения дрона.
⇒ Camera | блок

Параметр, который задаёт угол наклона камеры. Он используется для режимов, таких как FPV angle mix и искусственный горизонт, и тоже виден только при включённом акселерометре.
⇒ Arming (взведение моторов) | блок

Задаёт максимальный угол наклона дрона, при котором разрешается взвести моторы. Это предотвращает запуск дрона в небезопасном положении, например, когда он лежит на боку или вверх дном.
Если вам не нужна такая защита, можно установить значение 180 градусов, что отключит проверку угла и позволит взводить моторы в любом положении. Это удобно, например, для функции flip over after crash — переворота дрона после падения, когда он лежит вверх дном
⇒ Расположение платы и датчиков / Board and Sensor Alignment | Блок
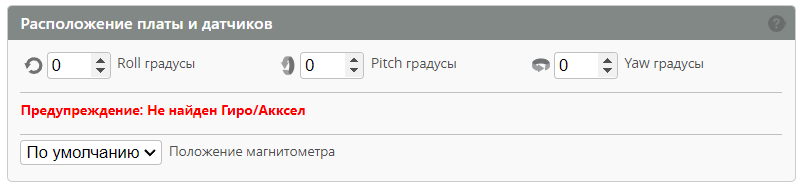
Позволяет виртуально сместить ориентацию полётного контроллера и других датчиков, если они установлены нестандартно, например, под углом или в перевёрнутом положении. Это важно для корректной работы датчиков и правильного отображения ориентации дрона.
Совет: если 3D-превью модели в Betaflight не соответствует реальному движению дрона, скорее всего, проблема в неправильной настройке выравнивания платы. Рекомендуется изменять параметры выравнивания шагами по 90 градусов (или 45 градусов, если плата установлена по диагонали) и проверять результат после каждого изменения.
⇒ Персонализация / Personalization | блок

Позволяет задать имя дрона и пилота, которое будет отображаться в OSD, логах Blackbox и в выводах diff/dump. Это удобно для идентификации и персонализации вашего оборудования.
⇒ Настройка DSHOT писка / DShot Beacon Configuration | Блок
![]()
— это функция, которая посылает высокочастотный сигнал на выход моторов, заставляя их резонировать и издавать звук. Это удобная альтернатива обычному зуммеру, но с рядом ограничений:
-
Не может быть активирована в полёте, так как моторы уже вращаются.
-
Звук не такой громкий, как у настоящего зуммера.
-
Нельзя использовать длительное время, потому что моторы могут потреблять слишком много тока и перегреваться.
Настройки:
-
Beacon Tone / Тон писка моторами — выбор одного из пяти различных звуковых тонов.
-
RX_LOST — включение или отключение сигнала при потере приёма с пульта управления.
-
RX_SET — включение или отключение сигнала при активации режима BEEPER.
Эта функция полезна для поиска дрона на земле, если он потерялся, но не заменяет полноценный зуммер для аварийных ситуаций в полёте.
⇒ Прочий функционал (Other features)
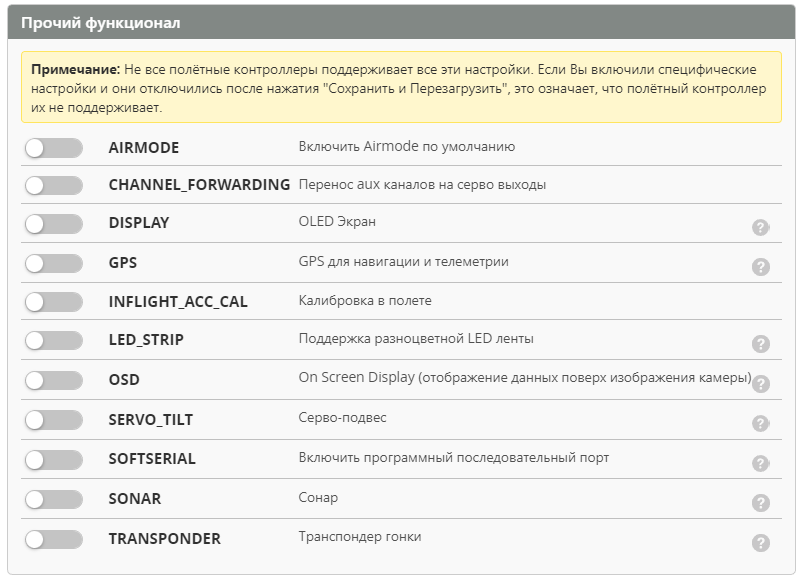
Это список различных функций, которые можно включать или отключать в зависимости от возможностей вашего полётного контроллера. Некоторые из них могут отсутствовать на вашем FC.
| Настройка | Описание |
|---|---|
| AIRMODE | Постоянное включение airmode — даёт больше контроля над дроном в воздухе при 0 газе. |
| CHANNEL_FORWARDING | Позволяет перенаправлять вспомогательный канал (aux) на выход мотора или сервопривода. |
| DISPLAY | Включает поддержку маленького OLED-дисплея для отображения информации. Если включён, но дисплей не подключён, загрузка FC занимает примерно на 10 секунд дольше. Сейчас не рекомендуется к использованию. |
| GPS | Включает поддержку GPS. Не включайте, если GNSS-модуль не подключён. |
| INFLIGHT_ACC_CAL | Позволяет калибровать акселерометр во время полёта. |
| LED_STRIP | Включает управление светодиодной лентой WS2812B RGB. |
| OSD | Включает OSD (он-скрин дисплей), который можно настроить во вкладке OSD. |
| SERVO_TILT | Включает режим CAMSTAB — стабилизацию угла камеры с помощью до двух сервоприводов в подвесе. |
| SOFTSERIAL | Эмуляция дополнительного последовательного порта (UART) на другом выводе или разделение RX-TX пары UART. Позволяет использовать дополнительный UART. |
| SONAR | Включает поддержку сонарного датчика, но сейчас не рекомендуется к использованию. |
| TRANSPONDER | Включает функцию гоночного транспондера, если ваше оборудование её поддерживает. |
Важная информация о Softserial
- Softserial полезен для контроллеров, у которых не хватает физических UART-портов для всех нужных функций.
- Работает на более низкой скорости передачи данных (baud rate). Лучше всего — 9600 бод, на более высоких скоростях может работать нестабильно.
- Занимает больше ресурсов процессора, что может быть критично для слабых MCU.
- Не рекомендуется использовать для подключения приёмника из-за ограничений по циклу работы (duty cycle).
- Некоторые порты работают лучше, чем другие. Например, LED_STRIP обычно работает стабильно, а для других портов может потребоваться эксперимент.
- Максимум можно активировать не более двух Softserial портов одновременно.
Эти настройки позволяют гибко адаптировать функционал вашего дрона под конкретные задачи и оборудование, учитывая возможности и ограничения вашего полётного контроллера.
⇒ Конфигурация зуммера (Beeper Configuration)| Блок
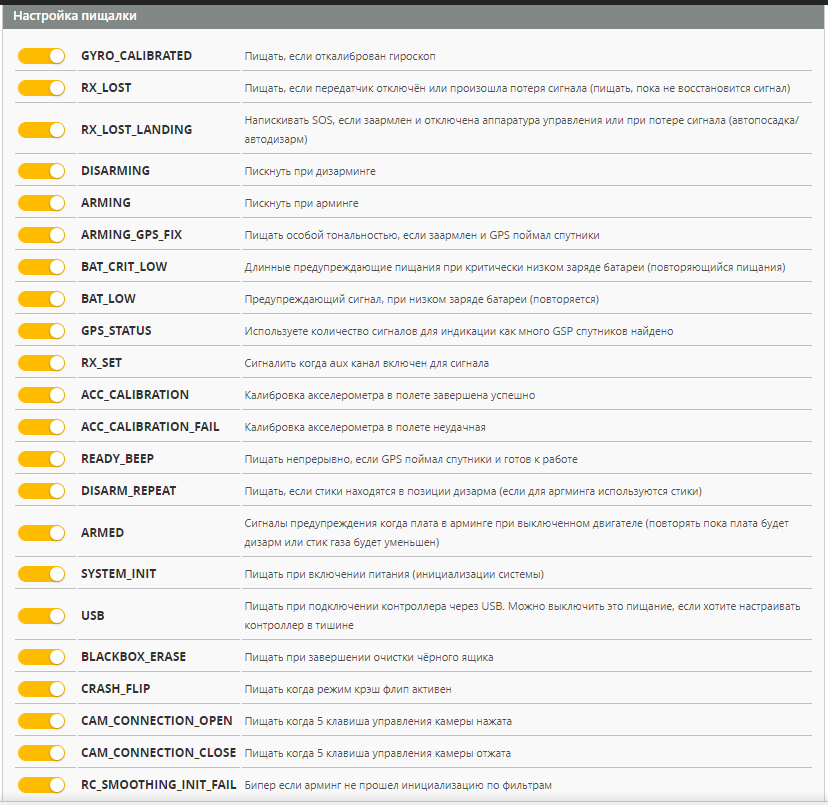
Позволяет включать или отключать звуковые сигналы (биперы) для различных событий и состояний дрона.
| Настройка | Описание |
|---|---|
| GYRO_CALIBRATED | Зуммер издаёт сигнал после калибровки гироскопа. |
| RX_LOST | Зуммер сигнализирует при потере сигнала пульта управления (повторяется, пока сигнал не восстановится). |
| RX_LOST_LANDING | Зуммер сигнализирует при потере сигнала пульта во время посадки. |
| DISARMING | Зуммер подаёт сигнал при выключении моторов (disarm). |
| ARMING | Зуммер сигнализирует при взведении моторов (arm). |
| ARMING_GPS_FIX | Зуммер подаёт сигнал при взведении моторов, если GPS имеет фикс. |
| BAT_CRIT_LOW | Зуммер сигнализирует при критически низком заряде батареи (повторяется). |
| BAT_LOW | Зуммер подаёт сигнал при низком заряде батареи (повторяется). |
| GPS_STATUS | Зуммер издаёт количество сигналов, равное числу найденных спутников GPS. |
| RX_SET | Зуммер сигнализирует при включении режима BEEPER. |
| ACC_CALIBRATION | Зуммер подаёт сигнал при успешной калибровке акселерометра в полёте. |
| ACC_CALIBRATION_FAIL | Зуммер сигнализирует при неудачной калибровке акселерометра в полёте. |
| READY_BEEP | Зуммер подаёт сигнал, когда GPS зафиксировал позицию и дрон готов к взведению. |
| DISARM_REPEAT | Зуммер сигнализирует, если стики находятся в позиции выключения моторов (disarm). |
| ARMED | Зуммер издаёт сигнал, когда дрон взведён, но моторы не вращаются (повторяется до повышения газа или выключения моторов). |
| SYSTEM_INIT | Зуммер сигнализирует при включении питания полётного контроллера. |
| USB | Зуммер подаёт сигнал при питании от USB. Можно отключить, чтобы не мешал при настройке на столе. |
| BLACKBOX_ERASE | Зуммер сигнализирует при стирании логов Blackbox. |
| CRASH_FLIP | Зуммер подаёт сигнал при активации режима переворота после падения (crash flip). |
| CAM_CONNECTION_OPEN | Зуммер сигнализирует при открытии меню OSD с помощью 5-кнопочного управления. |
| CAM_CONNECTION_CLOSE | Зуммер подаёт сигнал при закрытии меню OSD. |
| RC_SMOOTHING_INIT_FAIL | Зуммер сигнализирует, если дрон взведён, но функция сглаживания RC не инициализирована. |
")