")
Как настроить GPS Rescue в Betaflight (Возврат FPV-дрона домой)
Режим GPS Rescue в Betaflight похож на функцию «Возврат домой» на дроне DJI. Эта функция предназначена для автоматического возврата FPV-дрона к точке запуска и его посадки в случае возникновения аварийной ситуации или ухудшения видеосигнала. Это руководство - как настроить режим GPS Rescue, протестировать его и устранить наиболее распространенные проблемы.
Оглавление
- Почему GPS Rescue — это прорыв
- Как выбрать лучший GPS-приемник?
- Рекомендации по GPS
- Нужен ли барометр?
- Необходимость компаса
- Подключение GPS-модуля к полетному контроллеру
- Настройка GPS в Betaflight
- Ожидание получения GPS-сигнала
- Индикаторы светодиодов
- OSD
- Радиотелеметрия
- Тестирование режима Angle
- Отключение магнитометра
- Избегайте использования 8K/8K
- Активация режима GPS Rescue в аварийном режиме
- Что происходит после активации failsafe через GPS?
- Как остановить режим GPS Rescue
- Объяснение настроек GPS Rescue
- Как вручную активировать GPS Rescue?
- Резервный канал газа
- Как проверить работу GPS Rescue
- Советы и устранение неполадок
- Лучшие места для установки GPS-модуля
- Как быстрее получить GPS-сигнал
- Рекомендации от разработчиков Betaflight
- Дрон летит не в том направлении в режиме спасения?
- Проверка точности GPS (HDOP/PDOP)
- Избегайте Softserial
- Нет GPS-сигнала
- Не удается активировать GPS после обновления Betaflight
- Понимание точности GPS-координат
Почему GPS Rescue — это прорыв
Стандартным действием в аварийном режиме в Betaflight является падение дрона. С режимом GPS Rescue ваш дрон может вернуться обратно к точке запуска и приземлиться сам! Это особенно полезно для полетов на большие расстояния.
Как выбрать лучший GPS-приемник?
Хороший GPS приемник:
- M10 GPS — лучший вариант.
- приемник должен поддерживать протокол UBLOX. Избегайте NMEA, так как он поддерживает только частоту обновления 1 Гц, что слишком медленно.
- Выбирайте самый большой GPS-приемник, который вы можете комфортно разместить на своем дроне — больший размер модуля обеспечивает большую антенну и лучший сигнал.
- Если ваш GPS не может стабильно получать более 10 спутников на улице, использовать его будет рискованно.
Рекомендации по GPS
- Лучший выбор:
- GEPRC M1025Q

- HGLRC M100 5883
- Минимальный приемлемый размер:
- GOKU GM10 Nano V3
- FlyFishRC M10 Mini
- HGLRC M100 Mini
Выбор меньшего GPS-модуля помогает сэкономить вес, но при этом вы теряете часть чувствительности, которую обеспечивают модели с большой антенной.
Поколение чипа GPS
Большинство GPS-модулей для FPV-дронов используют чип M8, M9 или M10.
Чип M10 — самый новый и предлагает наилучшую производительность. Он способен одновременно подключаться к четырем глобальным системам GNSS (GPS, Galileo, Glonass и Beidou). Это приводит к быстрому захвату сигнала и подключению к большему количеству спутников. Цена M10 примерно такая же, как у M8, что делает их экономически эффективным обновлением.
Царапины на антенне
Заметили царапины на металлической части антенны GPS? Не волнуйтесь; это не обязательно признак дефекта или повреждения. Это часто результат заводской настройки для обеспечения оптимальной частоты. Такие антенны имеют номинальную настроенную частоту, которая часто регулируется изменением конструктивных элементов, расположением компонентов и пайкой. Небольшие надрезы в центре длинных сторон или углов могут быть признаком точной настройки.
Нужен ли барометр?
Барометр измеряет высоту с помощью давления воздуха. Многие полетные контроллеры оснащены им на уровне встроенного модуля, например, BMP280 (Speedybee F405 V4 и RushFPV F722 V2). Барометр не обязателен для GPS rescue, но он может повысить точность определения высоты, что приведет к лучшему контролю высоты и более надежной посадке. Просто помните, если вы применяете лак для водонепроницаемости, избегайте покрытия им барометра.
Некоторые GPS-модули имеют встроенный барометр. Если ваш полетный контроллер не имеет его, добавление модуля с барометром может быть полезным.
Нужен ли компас?
Компас (известный также как магнитометр в Betaflight) нужен для определения направления движения дрона.
Для работы режима GPS Rescue в Betaflight НЕ требуется компас, но его использование может улучшить производительность GPS rescue, особенно в ситуациях с боковым ветром или при удержании позиции, поскольку он обеспечивает точную информацию о направлении независимо от направления движения. Без компаса Betaflight оценивает направление с помощью данных GPS, что может быть неточным, когда дрон дрейфует (например, при боковом ветре), вызывая неэффективные корректировки.
Тем не менее, хотя компас может повысить производительность, он добавляет сложности. Для него требуется тщательная настройка в Betaflight, дополнительная проводка, правильная ориентация при установке и калибровка. Также он чувствителен к электрическому шуму, что может привести к неточным показаниям.Если у вас нет специальных требований, для большинства полетов компас не обязателен.
Некоторые GPS-модули имеют встроенный компас. GPS модуль без компаса имеет 4 провода, с компасом - 6 проводов. Два дополнительных провода используются для подключения к порту i2c на полетном контроллере (SCL и SDA).
Подключение GPS-модуля к полетному контроллеру
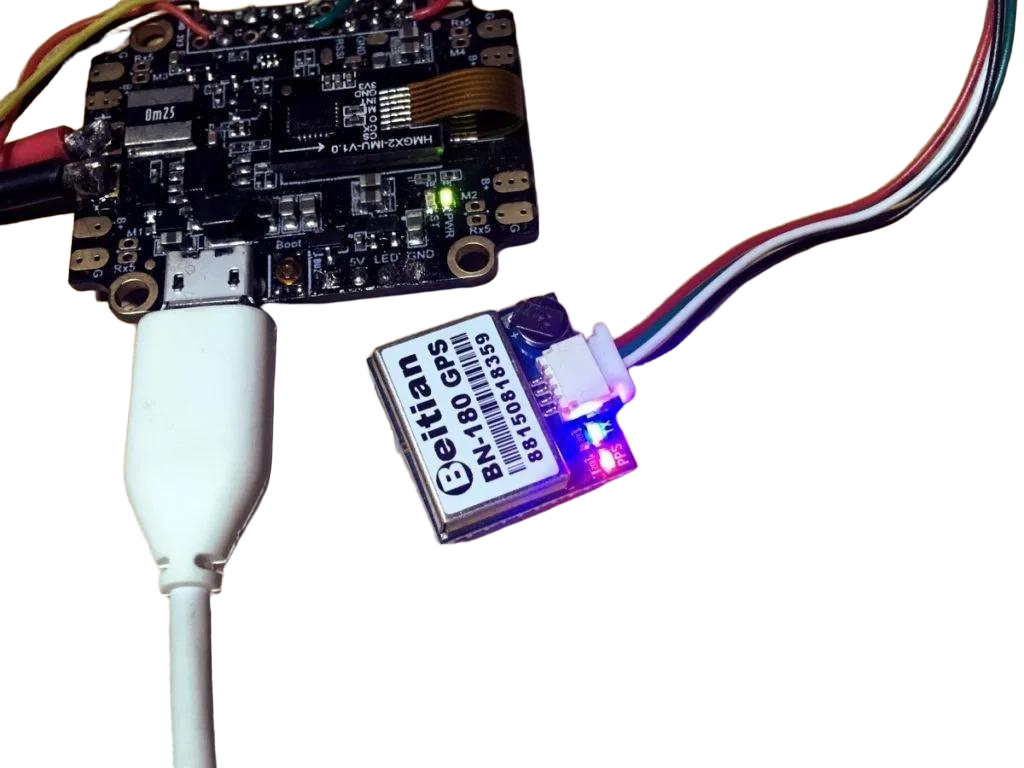
Подключение GPS-модуля к полетному контроллеру достаточно простое. Просто подключите его напрямую к любому доступному UART на FC, (TX к RX, RX к TX), и подайте питание 5 В.
- GPS RX – FC TX
- GPS TX – FC RX
- GPS 5V – FC 5V
- GPS GND – FC GND
- GPS SDA – FC SDA (если GPS имеет компас)
- GPS SCL – FC SCL (если GPS имеет компас)
Избегайте использования Softserial для подключения GPS, так как он ограничен скоростью 19200 бод. При скорости 9600 бод надежность GPS для GPS rescue снижается. Лучше всего использовать аппаратный последовательный порт для стабильного и надежного соединения.
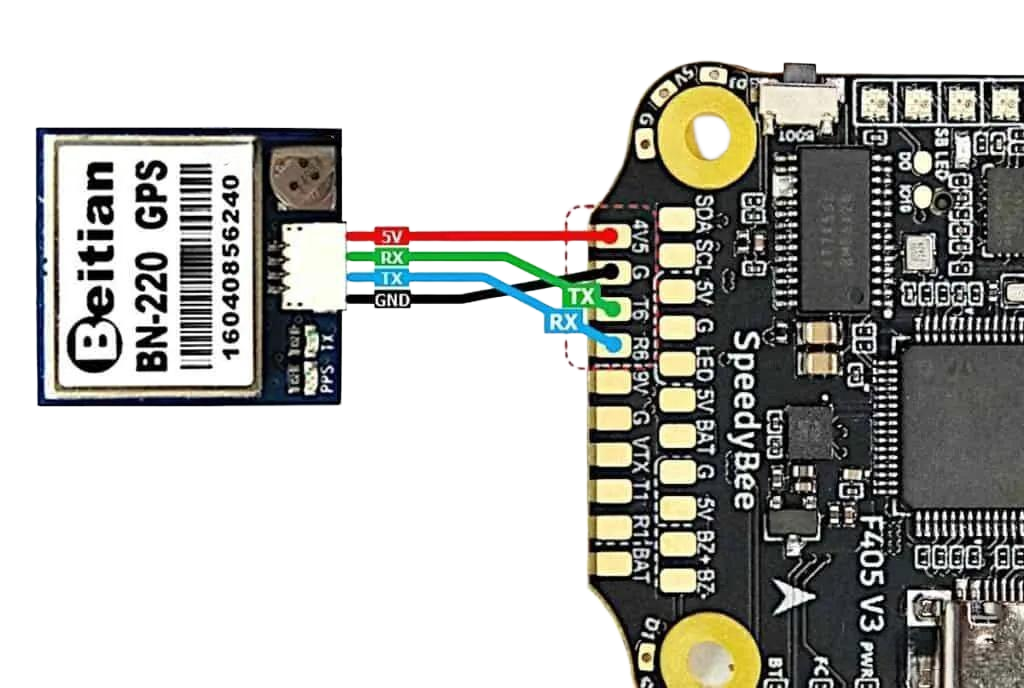
Некоторые полетные контроллеры, такие как Speedybee F405, имеют 4V5 контакты. По сути, они такие же, как и 5V, но имеют дополнительное преимущество — получают питание от USB. Это особенно удобно, когда GPS долго ищет спутники. Используя USB для питания, вы избежите риска перегрева VTX во время ожидания с LiPo аккумулятором. Это также помогает GPS быстрее заблокироваться, так как отключенный VTX не передает и не создает помех. Обратите внимание, что некоторые FC могут выдавать 5V, питаемые от USB, но под другими обозначениями; проверьте с помощью мультиметра, если не уверены.
Настройка GPS в Betaflight
Режим GPS Rescue в Betaflight постоянно развивается, поэтому важно использовать последнюю версию прошивки для новых функций и исправлений ошибок.
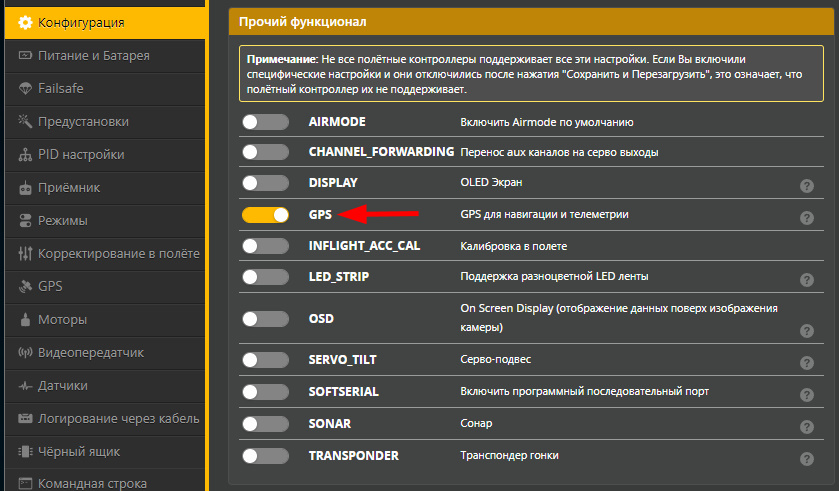
Сначала в разделе Configuration / Конфигурация в Betaflight Configurator активируйте GPS для навигации и телеметрии в разделе Other Features / Прочий функционал. Если GPS всегда деактивируется после перезагрузки, возможно, вы не выбрали GPS в параметрах Cloud Build при создании прошивки.
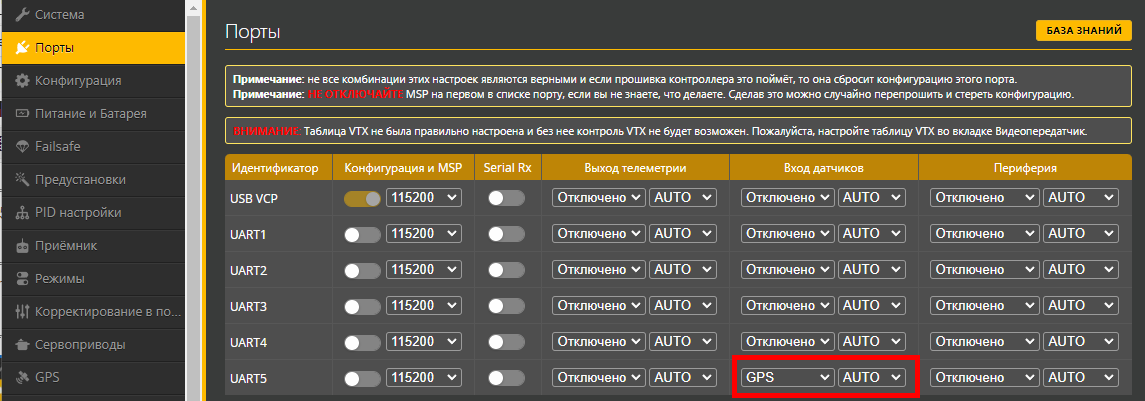
Далее, в разделе Ports / Порты назначьте для GPS соответствующий UART в разделе "Sensor Input". Betaflight поддерживает различные скорости передачи данных: 9600, 19200, 38400, 57600, 115200. Если вы не знаете, какую скорость поддерживает ваш GPS-модуль, обычно работает AUTO.
Рекомендуемая скорость передачи данных для частоты обновления GPS 10 Гц — 38400 или 57600. Мало что можно выиграть, используя 115200 при 10 Гц, но использование более низких скоростей снижает нагрузку на ЦП и более устойчиво к электрическим помехам.
| Частота обновления GPS | Скорость передачи | Нагрузка на процессор | Комментарии |
|---|---|---|---|
| 20Гц | 115200 | Самая высокая | M10 только; тестировать осторожно! |
| 10Гц | 38400 или выше | Средняя | 10Гц и 57600 рекомендуется для GPS Rescue |
| 5Гц | 19200 или выше | Средняя | Хорошие настройки для общего использования |
| 1Гц-2Гц | 9600 или выше | Наименьшая | Слишком медленно для плавного GPS rescue, OK для простой информации о положении/скорости |
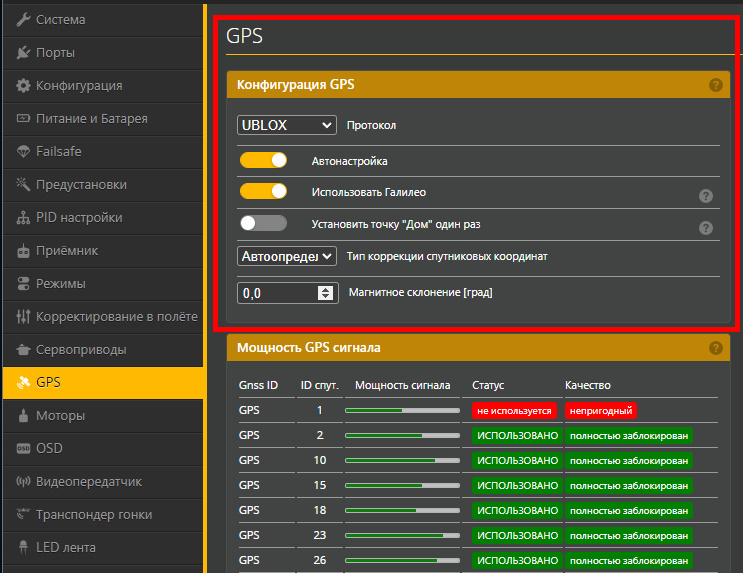
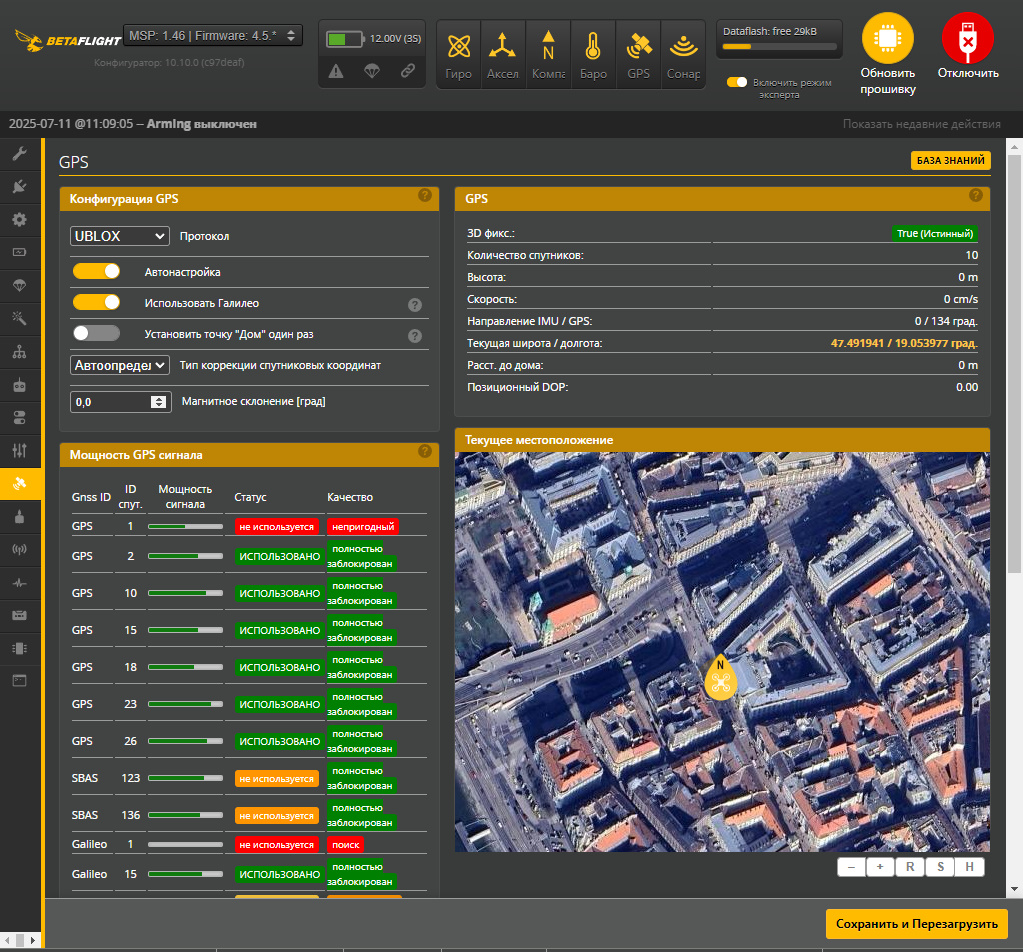
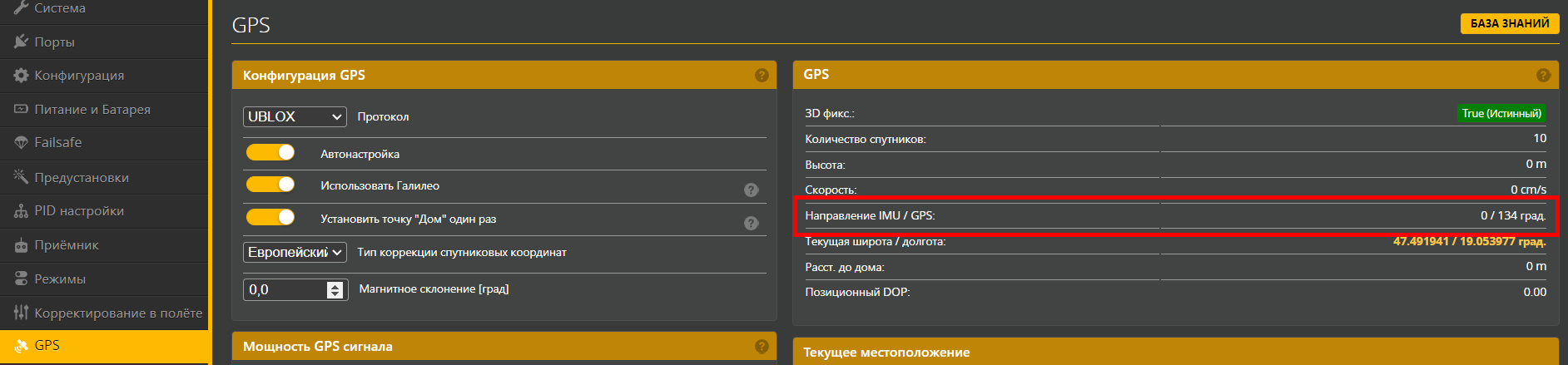
В разделе GPS сделайте следующее:
- Выберите UBLOX как протокол, который является стандартом для большинства GPS.
- Включите Auto Config / Автонастройка.
- Включите Use Galileo / Использовать Галилео — это улучшает точность позиционирования.
- Включите Set Home Point Once / Установить точку Дом один раз, чтобы предотвратить сброс точки старта при каждом включении/выключении питания, пока вы не отключите аккумулятор.
- Выберите Auto-detect / Автоопределение для Ground Assistance Type, чтобы улучшить точность позиционирования.
- Сохраните и перезагрузите.
После настройки индикатор GPS в верхней части конфигуратора должен загореться, что указывает на связь с FC. Красный значок означает, что GPS общается с FC, но нет фиксации спутников, а желтый значок указывает на успешную фиксацию спутников GPS.

Если индикатор GPS остается не активным, проверьте следующее:
- Питание GPS. Попробуйте подключить внешний аккумулятор
- Неправильные параметры. Например, неправильная скорость передачи или протокол.
- Неправильное подключение. Попробуйте поменять местами TX и RX.
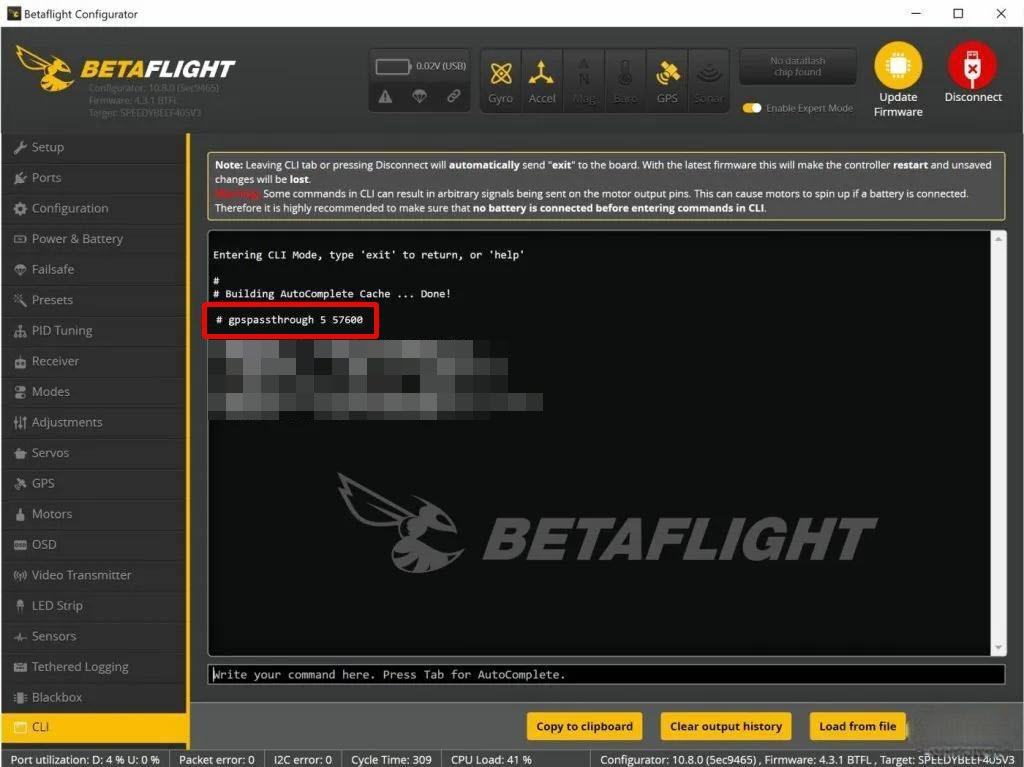
Как проверить, работает ли GPS?
Не знаете, обменивается ли ваш GPS-модуль данными с полетным контроллером?
Команда gpspassthrough в CLI может показать текущий обмен данными. Поток двоичных данных означает, что обмен происходит.
Выполнение команды gpspassthrough в CLI может показать любой текущий обмен данными между FC и GPS. Появление потока символов означает, что обмен данными происходит. Если вы ничего не видите, может быть проблема с питанием, подключением UART или настройкой.
Ожидание получения GPS-сигнала
Получение GPS-сигнала (или "трехмерной фиксации") требует захвата минимум четырех спутников и может занять несколько минут.
Когда вы впервые включаете GPS-модуль в новом месте, поиск спутников занимает больше времени, это называется "холодный старт". Последующие запуски происходят быстрее, так как модуль запоминает положение спутников (например, при замене аккумулятора).
Получить сигнал внутри помещения труднее. Если вам нужно протестировать дрон внутри дома, постарайтесь подойти ближе к окну с антенной, направленной вверх.
Вы увидите информацию о GPS в разделе GPS, где отображается статус вашего сигнала, GPS-координаты и местоположение на карте, подтверждающие точность GPS-позиционирования.
Индикаторы светодиодов
У большинства GPS модулей, таких как BN220, BN180 и BN880, есть два индикатора, обозначенных как "TX" (обычно синий) и "PPS" (обычно красный).
- Мигающий синий (TX) указывает на подключение UART. Если он выключен, значит, GPS не отправляет данные. Это также индикатор частоты обновления: при 1 Гц он должен мигать один раз в секунду, а при 5 Гц — пять раз в секунду.
- Мигающий красный (PPS) указывает на 2D/3D фиксацию GPS. Если "PPS" выключен, то фиксации еще нет.
Когда GPS получает 3D фиксацию, красный светодиод на модуле BN-220 должен мигать (вместе с синим светодиодом).
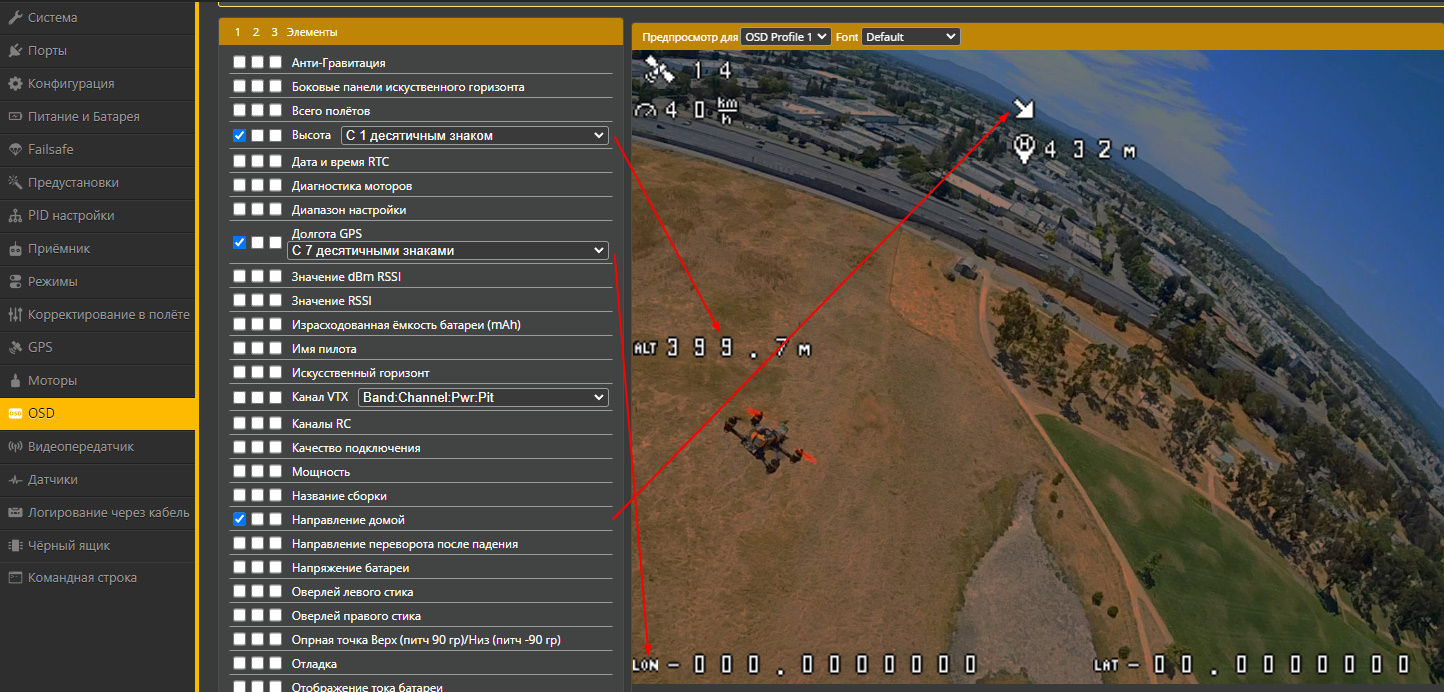
OSD
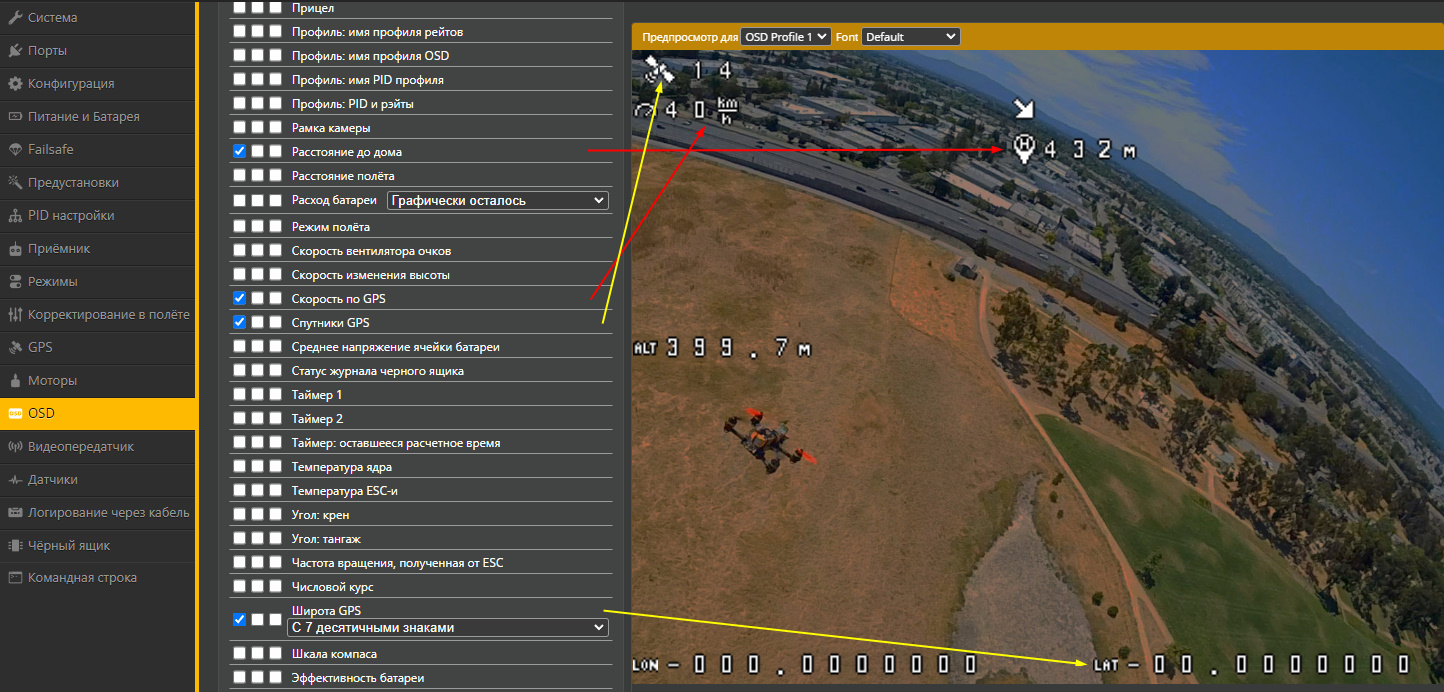
Вы можете отображать информацию GPS на экране OSD. Это могут быть координаты GPS, расстояние, направление до дома и многое другое.
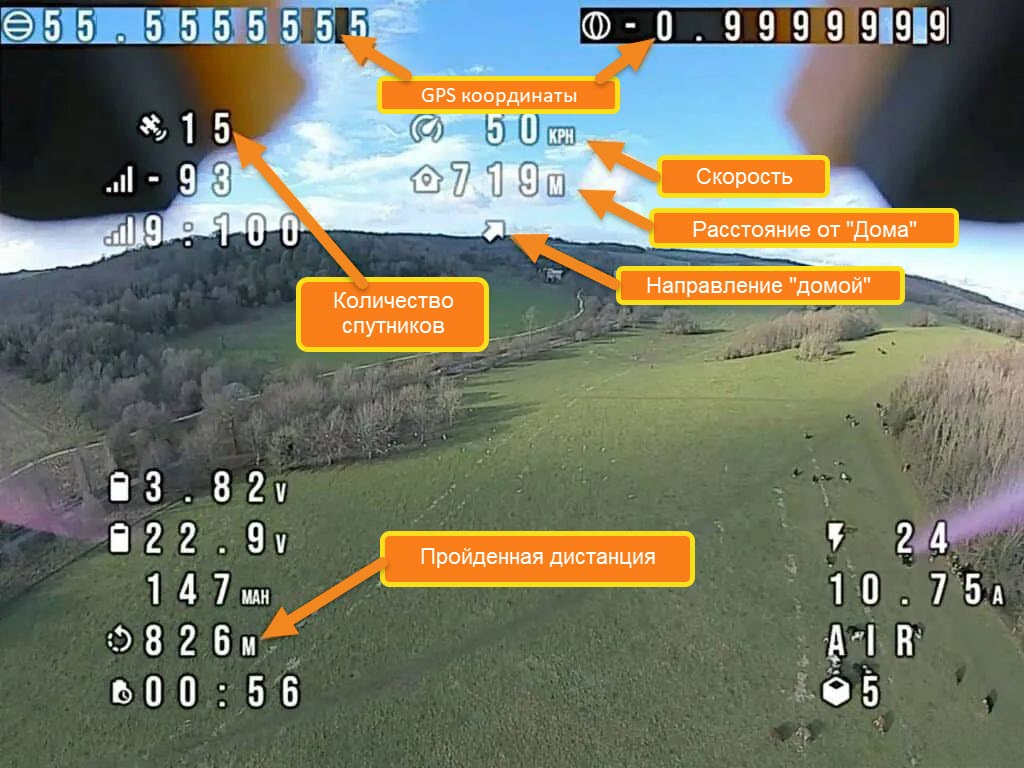
Чтобы узнать, сколько спутников в настоящий момент обнаружено вашим модулем GPS, разместите строку gps sats на экране OSD. 6-8 спутников минимум необходимо для работы GPS rescue. Чем больше, тем лучше. Ваши GPS-координаты станут более точными, когда вы получите больше спутников.
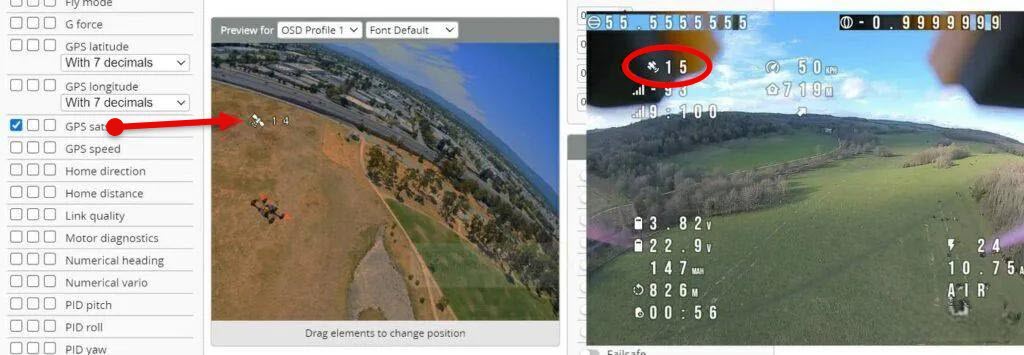
Вы также можете отображать HDOP рядом с количеством спутников. HDOP — это измерение качества GPS-фиксации. Значение HDOP 1 или ниже идеально, что даст вам точность около 2,5 метров или меньше. Можно сказать, что это горизонтальное отклонение в метрах.
Для этого перейдите в CLI и введите:
set osd_gps_sats_show_hdop = on save
Радиотелеметрия
После настройки GPS и получения фиксации перейдите на страницу телеметрии вашего радио, выберите "Обнаружить новые датчики" /“Discover new sensors”. Новые данные, связанные с GPS, должны появиться на экране Telemetry, включая GPS-координаты. [работает, если ваше радио поддерживает телеметрию — например, ExpressLRS и Crossfire]
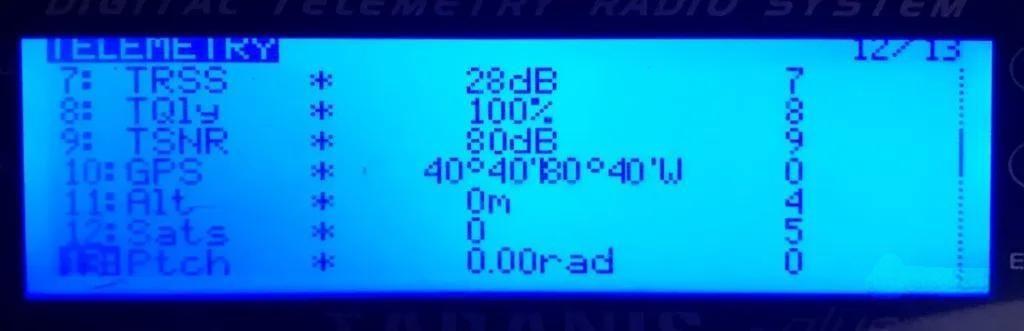
Данная телеметрия позволяет отслеживать последнее известное положение вашего дрона. Это может быть полезно для поиска потерянного квадрокоптера.
Тестирование режима Angle
Режим GPS Rescue в Betaflight зависит от режима Angle (режим самовыравнивания) для стабилизации дрона. Поэтому очень важно убедиться, что режим Angle работает правильно.
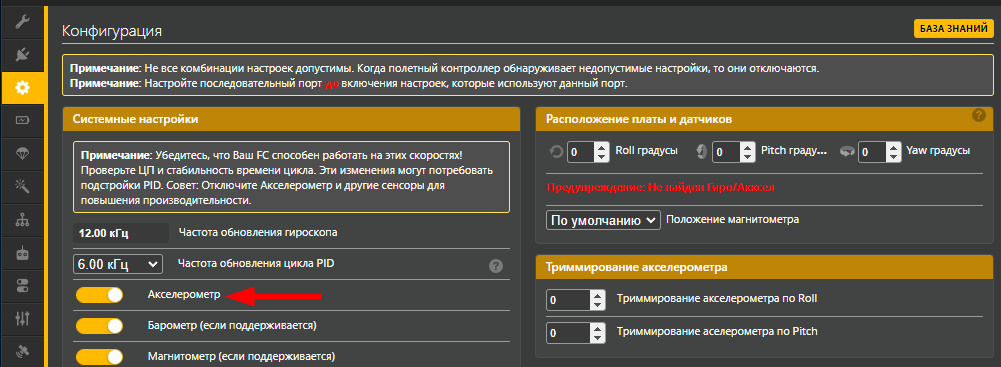
Сначала проверьте, что акселерометр. Он должен быть включен в разделе Configuration.
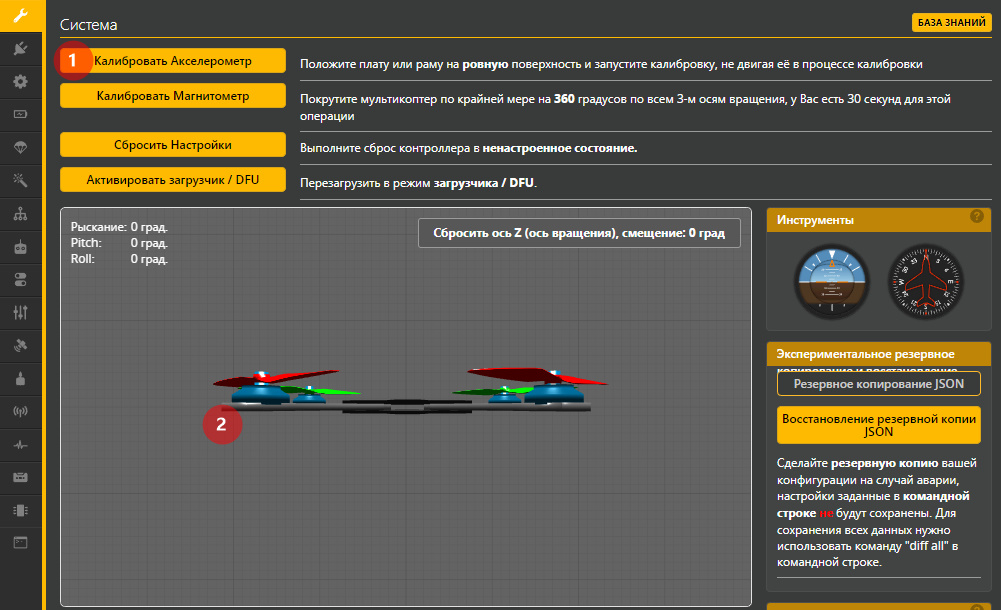
Затем перейдите в раздел Setup и откалибруйте акселерометр на ровной поверхности. В противном случае дрон может дрейфовать.
Чтобы проверить режим Angle, попробуйте зависнуть в воздухе, чтобы увидеть, самовыравнивается ли дрон. Помните, что режим Angle использует только акселерометр и гироскоп, поэтому он не будет удерживать дрон совершенно неподвижно, как DJI дрон. Небольшой дрейф из-за распределения веса и ветра нормален, если дрон остается стабильным. Если дрейф заметен, вы можете отрегулировать акселерометр в разделе Configuration, используя команды стиков на земле (маловероятно, что дрейф полностью устранится, поэтому не волнуйтесь).
Также обратите внимание на положение газа во время зависания (с половиной разряженного аккумулятора). Это значение будет полезно при настройке GPS rescue позже.
Отключение магнитометра
Как рекомендуют разработчики Betaflight, если вы не уверены, что ваш магнитометр (компас) правильно откалиброван и работает правильно, отключите его (в разделе Configuration, под акселерометром и барометром). Режим failsafe Betaflight не зависит от магнитометра, поэтому его можно отключить.
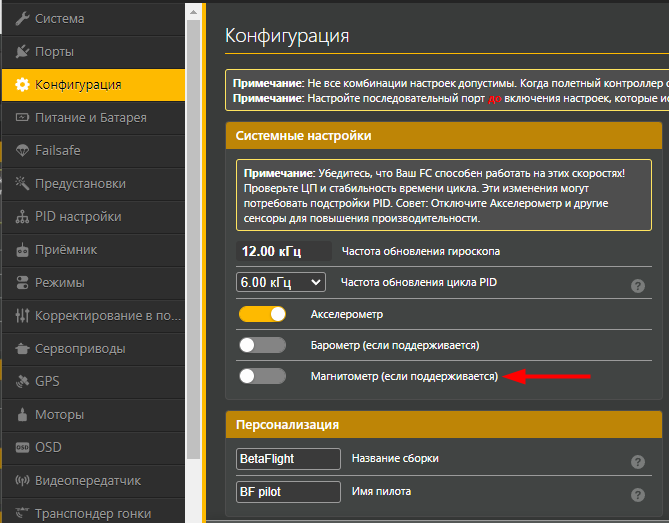
Чтобы проверить, работает ли ваш магнитометр, сравните значение компаса на вашем телефоне (установите отображение истинного севера, а не магнитного), с направлением на главном экране в разделе GPS в Configurator, и убедитесь, что оба значения отличаются не более чем на 10 градусов.
Если направление следует за движениями дрона, но затем прыгает в другое значение, магнитометр не работает правильно.
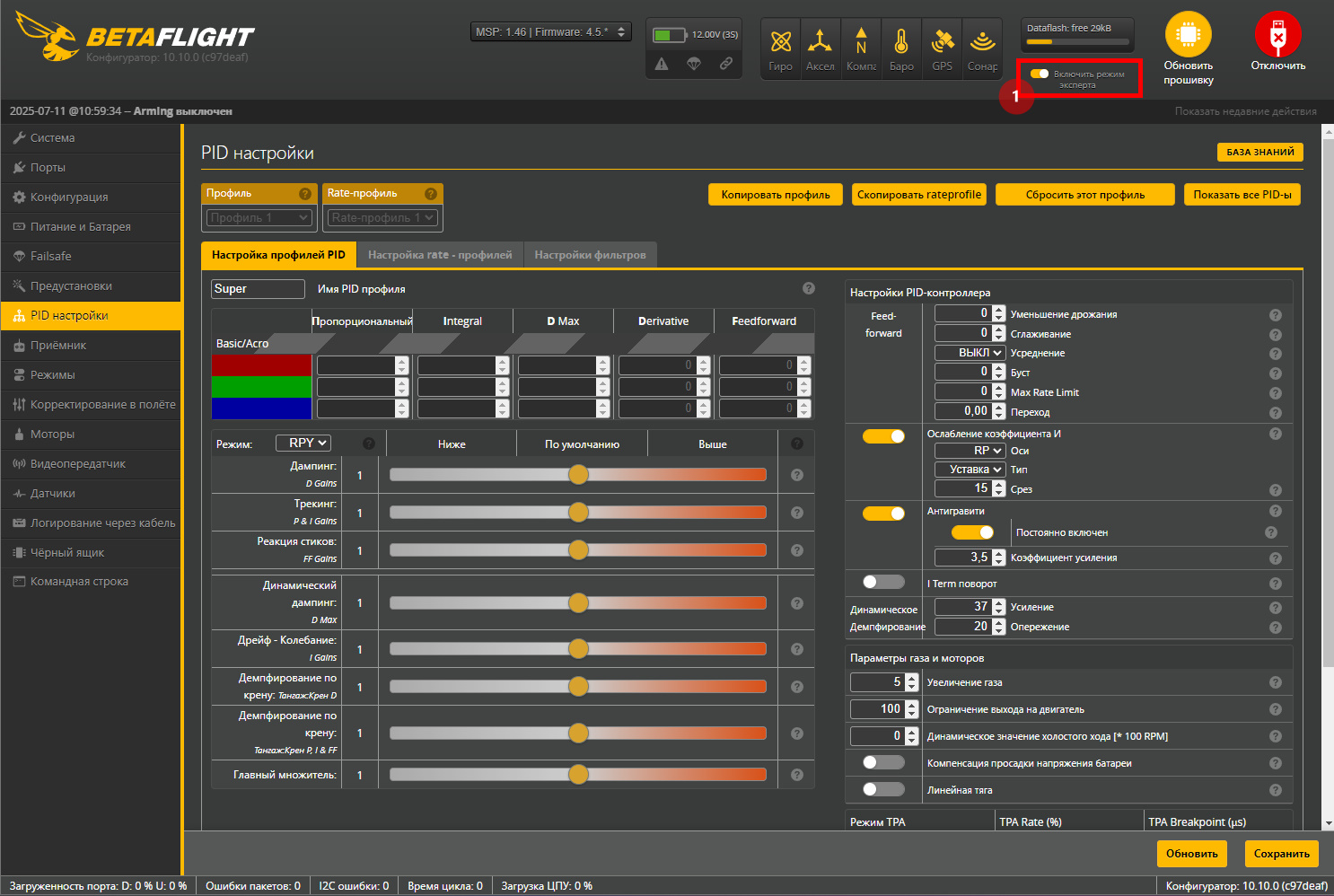
Избегайте использования 8K/8K
По рекомендации разработчиков, избегайте использования частоты PID Loop 8K, используйте 4K или ниже. Это связано с высокой нагрузкой на процессор GPS rescue, особенно при высоких скоростях передачи данных, таких как 56700 или выше. Снижение частоты PID позволит освободить ресурсы процессора для более надежной работы GPS rescue.
Активация режима GPS Rescue в аварийном режиме
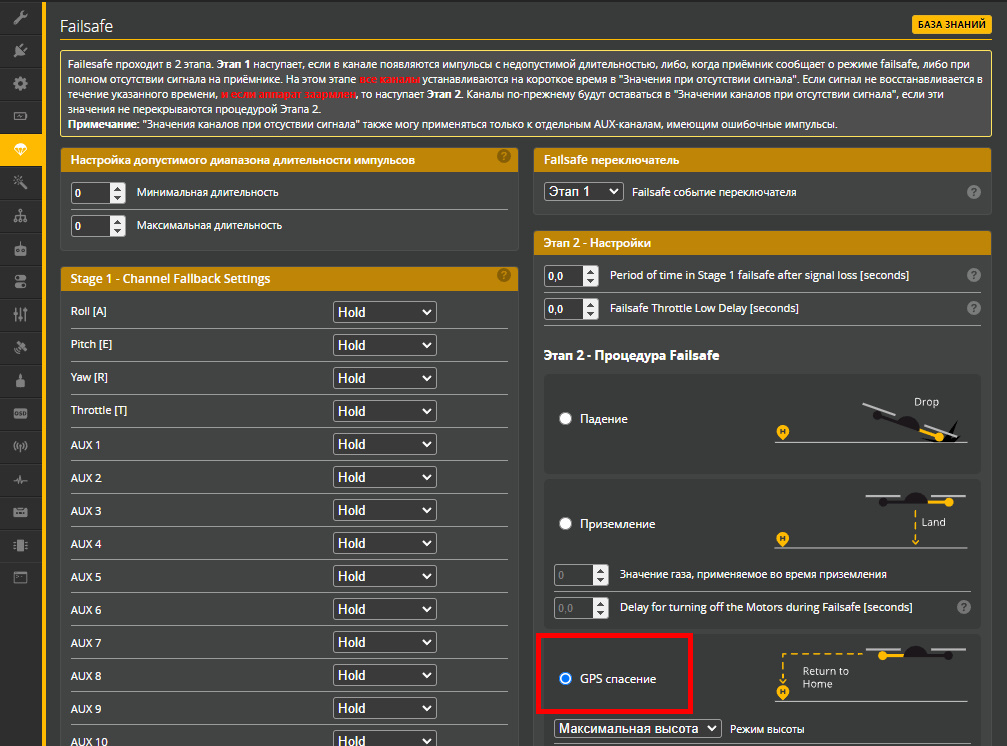
Перейдите в раздел Failsafe в Betaflight Configurator. Если вы не можете найти этот раздел, убедитесь, что вы включили опцию "Expert Mode" в верхней части экрана (рядом с кнопкой Update Firmware).
В разделе Stage 2 выберите GPS Rescue. Теперь, если ваш дрон войдет в аварийный режим, он активирует режим GPS Rescue.
Итак, что такое Failsaft / аварийный режим и что такое Stage 1 / Этап 1 и Stage 2 / Этап 2?
Вот краткий обзор: Ваш дрон переходит в аварийный режим при потере сигнала управления. По умолчанию он просто падает на землю, но с режимом спасения он попытается вернуться домой.
Во время аварийного режима ваш дрон сначала переходит на этап 1, делая паузу (время ожидания), чтобы посмотреть, вернется ли сигнал. Если нет, он переходит на этап 2, активируя режим GPS Rescue / GPS спасения, чтобы вернуть квадрокоптер.
Хотя установка GPS Rescue в качестве метода аварийного режима полезна, она не подходит для всех сред. Например, не рекомендуется использовать его в помещении, лесах, стадионах или в закрытых помещениях. Потеря контроля под деревом или внутри здания может привести к столкновению дрона с препятствиями при активации GPS rescue.
Если у вас нет GPS-сигнала при возникновении аварийного режима, квадрокоптер просто упадет на землю.
Что происходит после активации GPS rescue?
Смотрите, как работает режим GPS Rescue:
Betaflight Rescue Mode (BF4.4) - Использование переключателя и активация через аварийный режим. Автоматическая посадка как у дрона DJI
Режим спасения состоит из 5 этапов:
- Самовыравнивание: Дрон включает режим Angle и выравнивается.
- Подъем: Дрон поднимается на заданную высоту.
- Поворот: Он поворачивает в направлении дома.
- Полет домой: Дрон начинает движение обратно к точке запуска. Полет может быть не плавным, дрон может дергаться взад-вперед, пытаясь контролировать свою скорость.
- Спуск: После приближения к точке запуска он начинает медленно снижаться. Спуск может быть неравномерным, двигатели могут издавать пульсирующие звуки, так как дрон пытается замедлиться.
- Посадка: При приземлении дрон, чувствуя удар о землю, автоматически отключает двигатели.
Как остановить режим GPS Rescue
- Если режим GPS Rescue был активирован с помощью тумблера, просто отключите этот тумблер, чтобы вернуть управление.
- Если активация произошла через аварийный режим:
- Если это реальный аварийный режим, вызванный потерей сигнала управления, пилот должен переместить стики в состояние не более чем на 30% отклонения от центрального положения.
- Если аварийный режим был активирован вручную с помощью переключателя, просто отключите переключатель аварийного режима — нет необходимости двигать стики.
Объяснение настроек GPS Rescue
Настройки режима GPS Rescue доступны в разделе Failsafe.
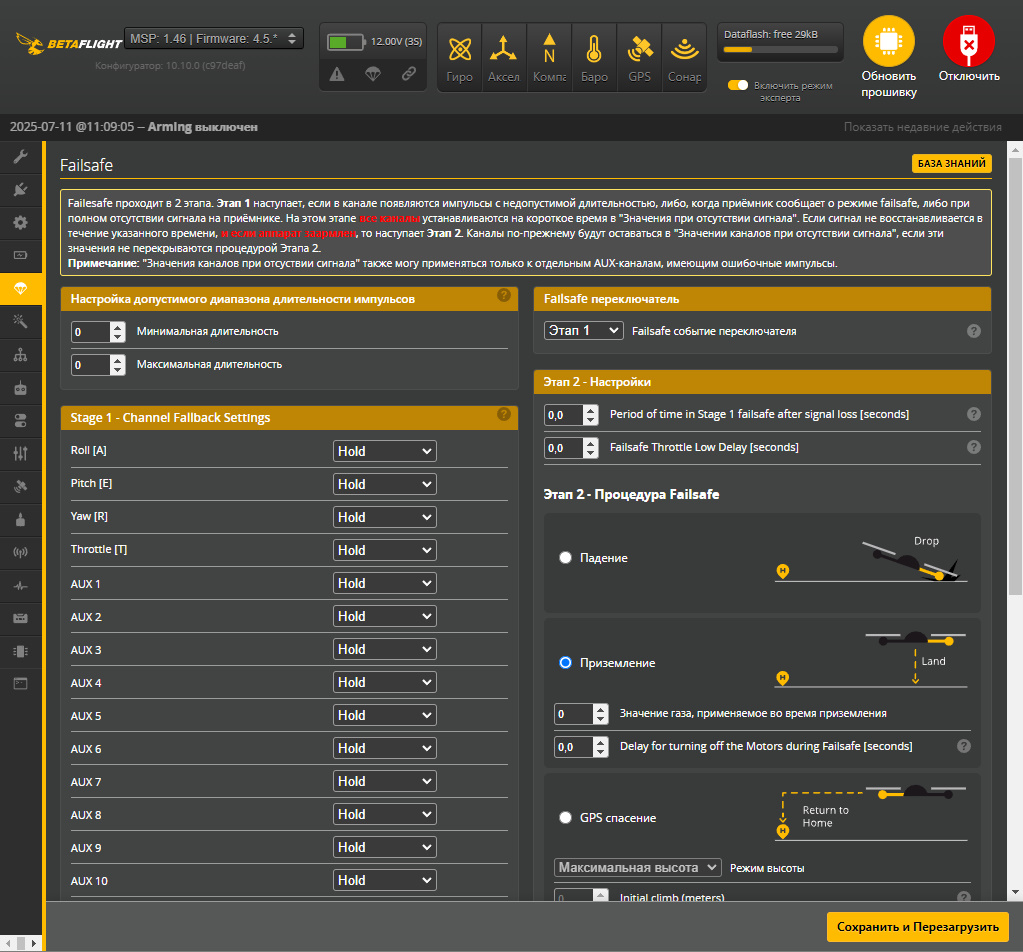
Вы должны настроить параметры GPS Rescue под конкретную настройку и окружающую среду. Для полного понимания каждого параметра можно посетитить страницу Wiki Betaflight: https://github.com/betaflight/betaflight/pull/11579. Значения по умолчанию обеспечивают хороший старт, особенно для дронов 5″.
Пример настроек для дрона 5″
Доступ ко всем настройкам можно осуществлять через CLI — просто введите get gps_rescue для получения полного списка параметров, связанных с GPS. Однако изменение их в GUI (раздел Failsafe) обычно более удобно для пользователя.
- Altitude Mode: Определяет высоту, на которой дрон возвращается домой.
- Максимальная высота — это максимальная высота, на которую дрон поднимался во время полета
- Фиксированная высота — это просто заранее заданное значение
- Текущая высота — это высота, на которой находится дрон, когда активируется режим GPS Rescue
Лучший выбор зависит от контекста каждого полета и окружения. Максимальная высота может быть безопасным вариантом, но не всегда правильным. Например, если вы совершали полеты над горами во время полета, вы можете тратить больше энергии на подъем до максимальной высоты при активации GPS rescue. При полете над океаном, где нет препятствий, фиксированная высота может быть хорошим вариантом. Используйте здравый смысл, адаптируйтесь к различным условиям и задачам.
- Initial Climb (метры): Расстояние, на которое дрон поднимается над текущей высотой, когда активируется GPS Rescue (режим высоты установлен на Current Altitude / Текущая высота или Max Altitude Mode / Максимальная высота).
- Return Altitude (метры): Применяется только в режиме Fixed Altitude / Фиксированная высота. Определяет высоту возврата дрона относительно его точки взлета. Она должна быть достаточно высокой, чтобы преодолеть препятствия, такие как деревья и здания, но не слишком высокой, чтобы чрезмерно расходовать аккумулятор при подъеме. Для мест взлета, где есть высокие деревья и холмы рекомендуется увеличивать это значение до 50 метров.
- Ascend/Descend Rate (метры/секунду) / Скорость подъема: Эти скорости зависят от среды, погоды и мощности дрона. Для настройки 5″ стандартные значения должны работать хорошо. Если вы используете литиевые аккумуляторы или LiPo с низким рейтингом C, рассмотрите возможность снижения скорости подъема.
- Return ground speed (метры/секунду): Это скорость, с которой дрон движется во время режима GPS Rescue. Стандартное значение 5 м/с составляет 18 км/ч - слишком медленно для большинства дронов. Можно удвоить это значение до 12 м/с (43 км/ч) для микродронов или 17 м/с (60 км/ч) для дронов 5″ и 7″. Не устанавливайте значение ниже 2 м/с, иначе ориентация не будет работать. Обратите внимание, что при вводе этого значения в графическом интерфейсе единицы измерения отличаются от CLI (в котором используется см/с).
- Maximum Pitch Angle: Эта настройка ограничивает угол наклона дрона. Более высокий угол приводит к более агрессивному возврату и более высокой скорости. Может быть полезно для тяжелых дронов, с высоким сопротивлением (парусностью) и сложным управлением. В ветреную погоду более высокий угол может быть необходим для поддержания скорости, особенно для маленьких дронов. Однако при слишком крутом угле дрон может потерять высоту и разбиться. Не знаете, что настраивать? Начните с значения по умолчанию 40 градусов — это безопасный выбор, который отлично работает для настроек 4 дюйма и 5 дюймов.
- Descend Distance (метры): Это расстояние от дома, на котором дрон начинает снижение. По умолчанию.
- Throttle minimum, Throttle maximum, Throttle hover — эти значения минимального, максимального и hovering газа, которые вы хотите использовать в GPS rescue. Установите максимальное значение такое, чтобы дрон не был слишком "дерганым" (должно быть выше вашего hovering уровня), установите минимальное значение, чтобы пропеллеры вращались с разумной скоростью (ниже вашего hovering уровня). Для начала значения минимального и максимального газа оставьте по умолчанию.
Для корректной настройки параметра Throttle Hover (газ для висения) в режиме GPS Rescue необходимо определить точное значение газа, при котором ваш квадрокоптер стабильно висит в воздухе, то есть поддерживает высоту без подъёма или снижения.
Вот как это сделать правильно:
-
Выполните тестовый полёт и постепенно меняйте газ, чтобы найти минимальное значение, при котором коптер висит ровно — не падает и не поднимается.
-
Используйте элемент OSD «Throttle %» для точного измерения значения газа, а не просто ориентируйтесь на ощущения.
-
Идеальное значение Throttle Hover должно немного превышать минимальный газ — если оно слишком низкое, квадрокоптер будет снижаться при активации Rescue и может упасть (например, в воду).
-
Значение Throttle Hover зависит от напряжения батареи: при низком напряжении коптер требует больше Throttle Hover. Поэтому выбирайте значение Throttle Hover при напряжении батареи около 3.8–3.9 В на банку — это примерно середина разряда, когда чаще всего срабатывает failsafe, и дрон находится далеко от пилота.
-
Установите это значение в настройках Betaflight в параметре «Throttle Hover» для GPS Rescue, а также в Stage 1 failsafe throttle, чтобы дрон при потере сигнала сначала удерживал высоту, а не снижался резко.
Таким образом, правильная настройка Throttle Hover обеспечивает плавное и безопасное срабатывание GPS Rescue, предотвращая падения и обеспечивая стабильный возврат домой
- Minimum Distance to Home / Минимальное расстояние до дома (метры):
Если режим Rescue активируется слишком близко к точке возврата (в пределах этого минимального расстояния), дрон сначала улетит по текущему курсу до достижения этого расстояния от дома, а затем начнёт стандартное поведение Rescue. Оставляйте для начала значение по умолчанию — 15 метров. - Minimum Satellites / Минимальное количество спутников:
Для надёжной работы режима Rescue требуется минимум 8 спутников. Если взлетать до того, как GPS поймает достаточное количество спутников, дрон не сможет точно определить домашнюю точку. Чем больше спутников — тем выше точность. По умолчанию — 8. - Allow Arming Without Fix / Разрешить арминг без GPS фиксации:
Эта опция даёт возможность включать моторы без GPS-сигнала. Можно включать для удобства тестовых полётов, но всегда старайтесь получить GPS-фиксацию перед использованием режима GPS Rescue.
Внимание: Включение моторов до получения GPS-сигнала не позволит активировать GPS Rescue в этом полёте, так как дрон не будет знать точку возврата.
Проверка работоспособности (Sanity Checks): Когда параметр установлен на "ON", он контролирует условия режима GPS Rescue:
- Подключен ли GPS к FC?
- Получаем ли мы достаточное количество спутниковых фиксаций?
- Находимся ли мы на расстоянии не менее 20 метров от дома?
- Приближаемся ли мы к дому, и не столкнулись ли мы с препятствием?
Если хотя бы одно из условий проверки Sanity Check не выполняется, режим GPS Rescue будет прерван, квадрокоптер разармится и упадёт на землю. Это не идеально, особенно если вы летите над труднодоступными местами, например, над океаном или горами, но в целом включение Sanity Checks необходимо для безопасности.
Betaflight wiki рекомендует при проблемах с опцией «On» во время тестов установить Sanity Checks в режим «Failsafe Only». В этом режиме проверки отключаются при активации Rescue тумблером, но включаются при срабатывании failsafe. Это позволяет избежать ложных срабатываний во время ручного включения Rescue и при этом сохраняет безопасность при реальной потере сигнала.
Полное отключение Sanity Checks очень рискованно — можно получить бесконечный «flyaway» (неуправляемый улёт). В Betaflight 4.4 добавлен лимит по времени — если проверки не проходят более 20 секунд, дрон автоматически разармится, даже если все проверки отключены. Это важная мера безопасности. Никогда не летайте с полностью выключенными Sanity Checks
Как вручную активировать режим GPS Rescue?
Для ручного запуска режима GPS Rescue в Betaflight, помимо автоматического срабатывания при failsafe, вы можете назначить специальный переключатель на пульте управления. Это удобно в экстренных ситуациях — например, если вы потеряли ориентацию или возникли проблемы с FPV-системой, — тогда дрон самостоятельно вернётся домой.
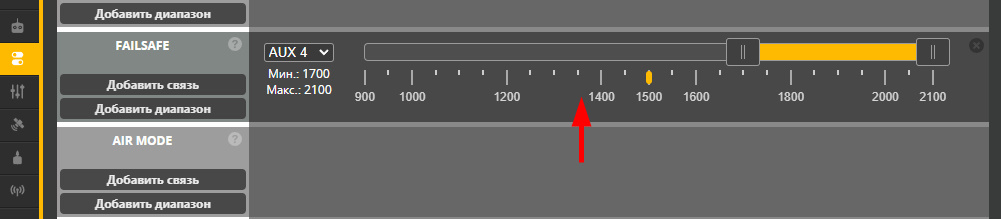
Чтобы настроить ручное включение GPS Rescue:
-
Откройте вкладку Modes в Betaflight Configurator.
-
Найдите функцию GPS Rescue и добавьте для неё диапазон срабатывания, назначив конкретный AUX-канал (переключатель) на вашем пульте.
-
Переключите этот тумблер, чтобы проверить, что режим активируется (в режиме Rescue в OSD должен появиться статус «Resc» вместо обычного режима полёта).
После этого вы сможете в любой момент вручную включить GPS Rescue, не дожидаясь failsafe. Это особенно полезно для быстрого возврата домой при потере видео или дезориентации.
Также можно настроить автоматическое срабатывание GPS Rescue при потере сигнала (failsafe), чтобы дрон автоматически включал режим возврата.
Таким образом, ручное управление GPS Rescue через выделенный переключатель даёт дополнительный уровень безопасности и контроля над дроном во время полёта.

канал газа при GPS RESCUE
При активации Stage 1 failsafe в Betaflight происходит переход в режим Channel Fallback — каждый канал радио устанавливается в заранее заданные значения. Очень важно правильно настроить эти значения для безопасности полёта.
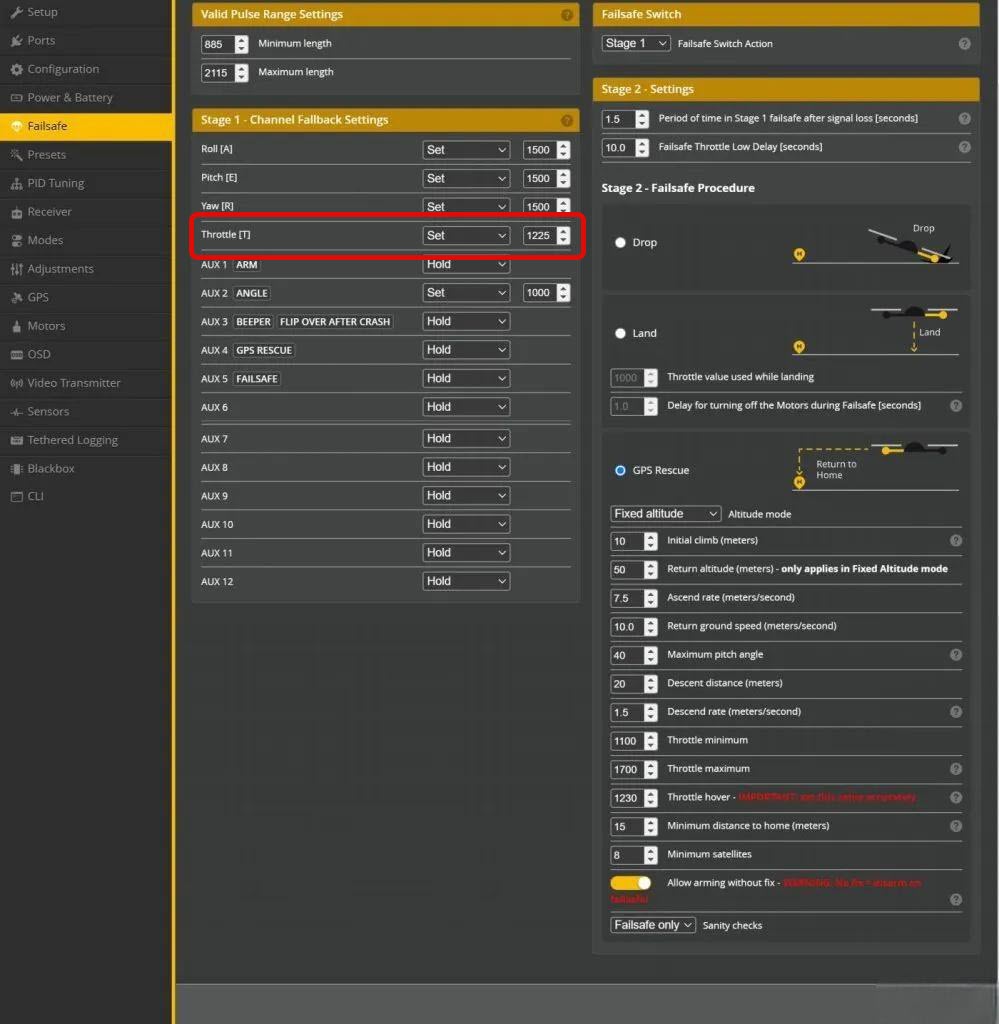
Особенности настройки Throttle Channel Fallback
-
По умолчанию для газа стоит значение Auto, что означает резкое снижение газа до минимума (0%). Это приводит к кратковременной остановке моторов в течение guard time (времени ожидания перед переходом в Stage 2), что может дестабилизировать дрон. В результате дрон может не пройти sanity check и упасть.
-
Вместо Auto рекомендуется установить Hold — удержание последнего значения газа, которое было перед потерей сигнала. Это предотвращает остановку моторов и помогает сохранить стабильный полёт до активации GPS Rescue.
-
Ещё более продвинутый подход — установить газ на значение Throttle Hover (газ для висения), а каналы Roll/Pitch/Yaw выставить в центр (около 1500 или Auto). При этом можно активировать режим Angle (стабилизация), чтобы квадрокоптер выровнялся и плавно завис в воздухе при срабатывании failsafe. Это обеспечивает максимальную стабильность перед включением GPS Rescue.
-
Никогда не устанавливайте газ в ноль (Auto) на Stage 1, если хотите избежать падения дрона!
Итого
| Канал | Рекомендуемое значение | Обоснование |
|---|---|---|
| Throttle (газ) | Hold или Set (Throttle Hover) | Предотвращает остановку моторов, стабилизирует полёт |
| Roll/Pitch/Yaw | Auto (центр 1500) | Центрирует стики, останавливает вращение, выравнивает коптер в Angle режиме |
| AUX-каналы | Hold или Set (по необходимости) | Например, включение звукового сигнала или режима полёта |
Дополнительный рекомендации
-
Время guard time для Stage 1 обычно устанавливается около 0.4–1.5 секунд — этого достаточно, чтобы дрон попытался восстановить сигнал, прежде чем перейти в Stage 2 (например, GPS Rescue или аварийное отключение моторов).
-
Stage 2 выполняет выбранную процедуру failsafe: отключение моторов (Drop), плавную посадку (Land) или возврат домой (GPS Rescue).
-
Если вы не уверены в настройках, лучше оставить значения по умолчанию, но для дрона с GPS Rescue желательно настроить газ на hover, чтобы избежать падения.
Таким образом, правильная настройка Throttle Channel Fallback — ключ к безопасному срабатыванию failsafe и успешному запуску GPS Rescue. Установка газа в Hold или на значение hover предотвращает резкую остановку моторов и падение дрона при потере сигнала.
Как проверить работу режима GPS Rescue
Проверка режима GPS Rescue — важный шаг перед его использованием в реальных условиях. Вот как я проверяю, что он работает должным образом.
Настройка
Сначала назначьте тумблер на вашем радио для GPS Rescue, чтобы убедиться, что он действительно может вернуть ваш дрон домой. Если что-то пойдет не так, выключение тумблера должно немедленно вернуть вам управление.
Затем назначьте другой тумблер для аварийного режима в разделе Modes. Это будет имитировать полный аварийный режим, точно так же, как при потере сигнала управления, но в более безопасной манере, так как вы можете выйти из режима в любое время с помощью тумблера. Важно отметить, что эта настройка предназначена исключительно для тестирования. После завершения тестирования не забудьте удалить режим Failsafe из раздела Modes.
С отсоединенными пропеллерами перейдите в раздел Modes и убедитесь, что активация переключателя аварийного режима действительно запускает режим спасения, во время которого ваше радио временно блокируется. Проверьте, можете ли вы выйти из аварийного режима и снова получить управление.
При тестировании через USB-подключение режим Rescue может не отображаться, как другие режимы полета. Однако, если маленькая желтая полоса перемещается в зону активации, значит, все работает правильно.
Добавление информации, связанной с GPS, в ваш OSD полезно для получения информации о состоянии дрона. Индикатор Flight Mode особенно полезен, отображая "RESC", когда вы находитесь в режиме Rescue, "Air" в режиме Rate и "Angle" в режиме Angle.
Полевые испытания
Для реального теста выберите открытое место без препятствий и людей, с мягкой травой. Убедитесь, что у вас есть действительная точка старта до взлета — желательно, чтобы OSD отображало не менее 8 спутников.
Произведите взлет и пролетите 50-100 метров, близко к земле, затем активируйте аварийный режим с помощью тумблера. Дрон должен немедленно перейти в режим GPS Rescue, и отобразиться в OSD как изменение режима полета с AIR на RSC.
Обратите внимание на стрелку направления домой в OSD; когда она указывает вверх, это означает, что вы летите домой, когда указывает вниз — вы летите в обратную сторону. Изначально стрелка может указывать в неправильном направлении, если вы не используете компас, это нормально, так как Betaflight может потребоваться 5-10 секунд, чтобы определить направление полета — просто через 10 секунд убедитесь, что дрон не летит в противоположном направлении.
Вы можете прекратить аварийный режим в любое время, выключив тумблер и немедленно получив полный контроль.
Если вы решите не выходить из аварийного режима, дрон продолжит полет обратно к точке запуска. Прибытие на место, он немного зависнет, прежде чем начать медленное снижение, во время которого двигатели могут пульсировать, пока он не приземлится и не отключится автоматически.
Вы можете повторить этот процесс несколько раз, пока не будете уверены в надежности системы. После тщательного тестирования не забудьте удалить аварийный режим из раздела Modes.
Советы и устранение неполадок
Лучшие места для установки GPS-модуля
Убедитесь, что керамическая антенна GPS-модуля ничем не закрыта, это критически важно для быстрого и надежного получения сигнала спутника. Все, что ее покрывает, особенно проводящие материалы, такие как углеволокно, электрические провода или металл, может значительно ослабить сигнал GPS.
Избегайте ЭМИ
Электромагнитные помехи (EMI) от других электрических компонентов на вашем квадрокоптере также могут влиять на работу GPS. Заметными источниками радиочастотных помех являются HD-камеры и видеопередатчики. Чтобы уменьшить это, устанавливайте GPS как можно дальше от этих устройств.
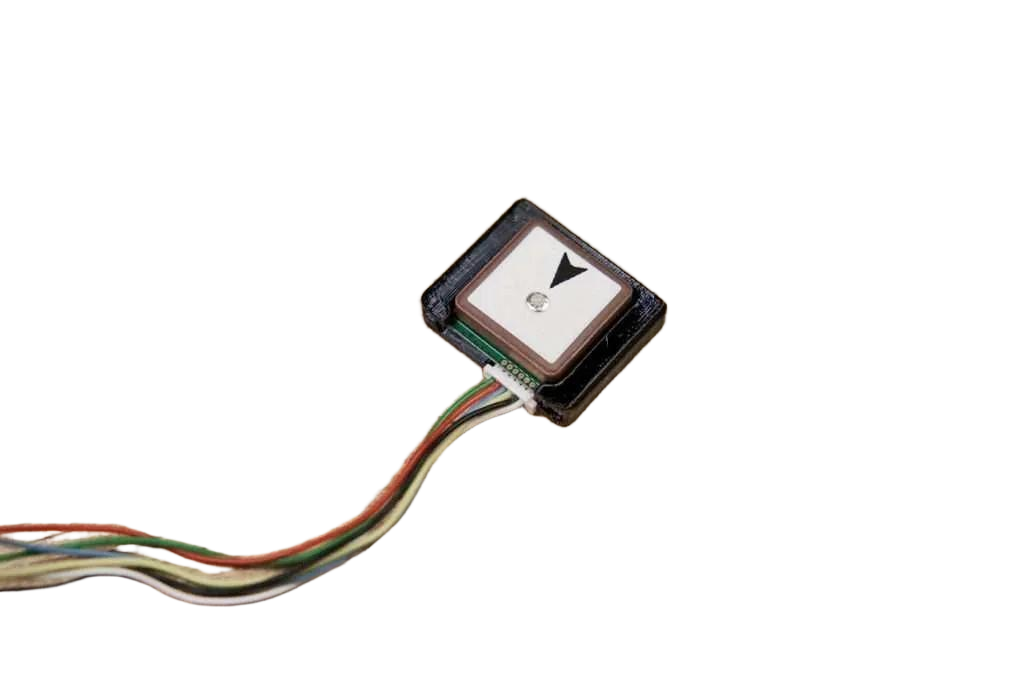
Правильная ориентация при установке
Распространенной ошибкой является установка GPS "вверх ногами". Антенна приемника, которую можно определить по плоской квадратной форме с маленьким металлическим круглым элементом в центре, должна всегда смотреть вверх. Убедитесь, что эта сторона не закрыта никакими компонентами. Например, на следующем изображении керамическая антенна направлена вверх
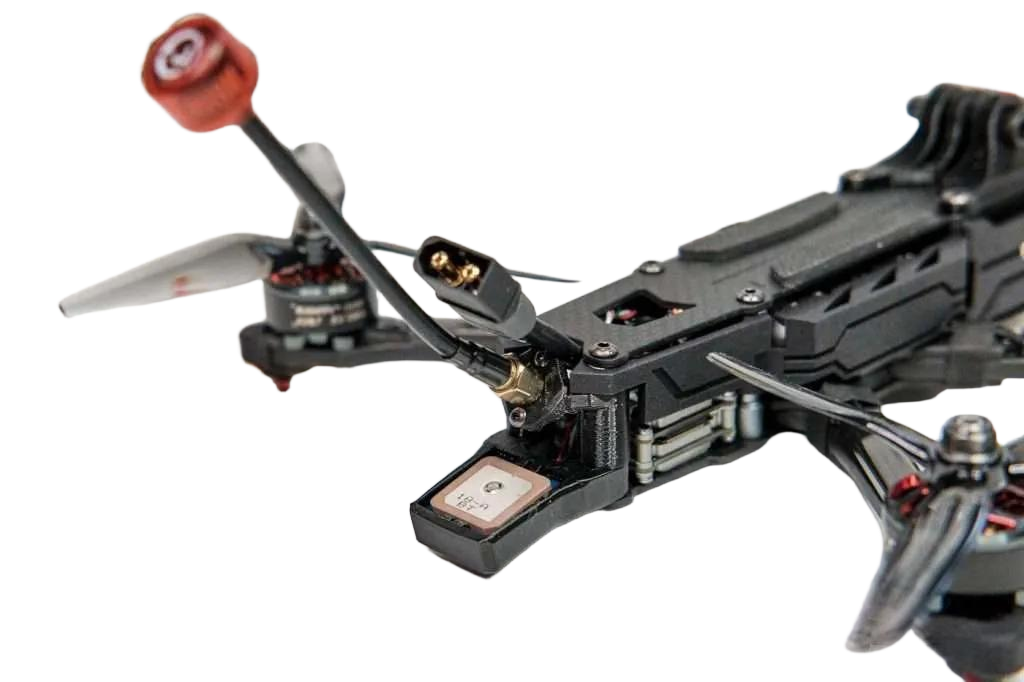
Где устанавливать GPS
Вот несколько моментов, которые стоит учитывать при установке GPS на квадрокоптер:
- Ничего не должно блокировать GPS-модуль
- Керамическая антенна должна быть направлена в небо
- Идеальные места для установки: верх квадрокоптера, подальше от антенн VTX и RX
- Держитесь подальше от возможных источников излучения, таких как HD-камеры, которые могут не иметь надлежащей EMI-защиты
Вот несколько идей по установке:

На верхней части GoPro/HD-камеры.

На верхней части рамы, если используется нижняя батарея.

На мачте, чтобы поднять GPS подальше от квадрокоптера. Однако будьте осторожны с близостью к антеннам VTX.
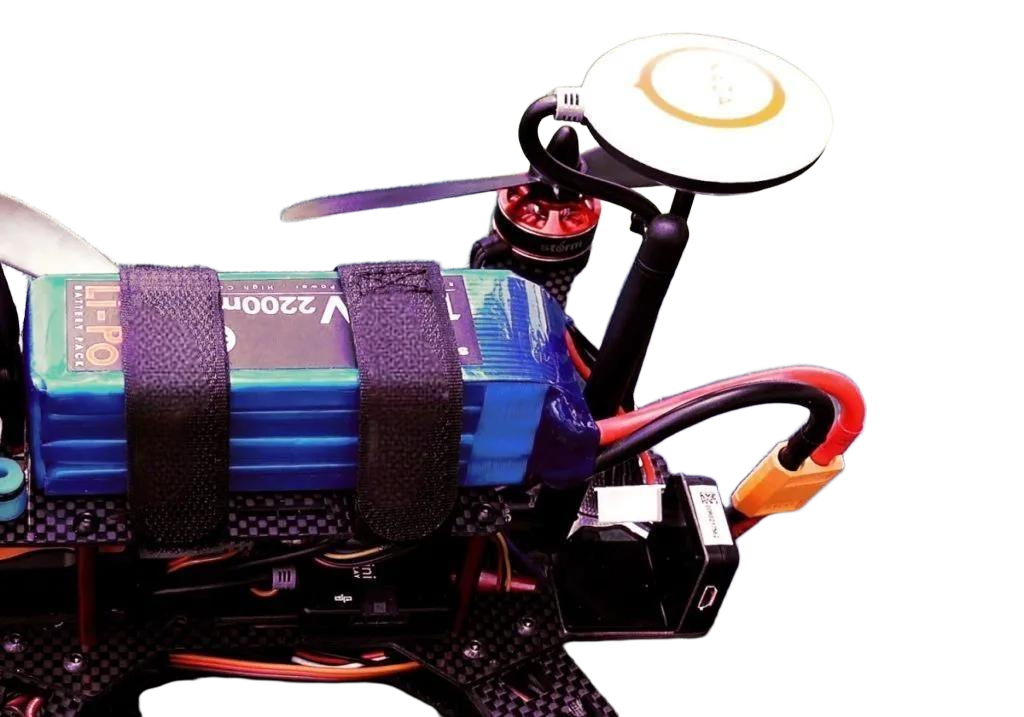
Один из способов — установить GPS на ремешке батареи.

Как быстрее получить GPS-сигнал
Большинство GPS-модулей имеют небольшую батарею для хранения данных спутников и времени, что помогает быстрее получать сигнал. Как только GPS зафиксирует спутники, он сохранит их позиции для быстрого повторного подключения после замены батареи. Если ваш GPS регулярно долго получает сигнал, проверьте, не разряжена ли его батарея с помощью мультиметра. Минимизируйте помехи насколько возможно — например, переместите мощный VTX, особенно если вы используете настройку 1,3 ГГц. Погодные условия, такие как облачная погода, также могут повлиять на качество сигнала GPS.
Рекомендации от разработчиков Betaflight
- Профи рекомендуют 10 спутников. [И] Подождать 30 секунд после получения 10 спутников для стабилизации высоты [перед взлетом].
-
Перед важным полётом обязательно проверьте нормальную работу режима GPS Rescue, активируя его вручную с помощью переключателя failsafe. Установите переключатель так, чтобы дрон сразу вошёл в Stage 2 (активация GPS Rescue). Вы можете включать и выключать режим Rescue с мгновенным эффектом с помощью переключателя. Убедитесь, что квадрокоптер поворачивается и летит в сторону точки возврата, выполняя все необходимые действия, прежде чем вы удалитесь настолько, что сработает настоящий failsafe.
Особое внимание уделите стрелке Home Arrow — она должна указывать точно в сторону точки возврата сразу после взлёта. Иногда, если при взлёте или во время армирования вы поворачиваете дрон вокруг своей оси, данные о положении (аттитюде) могут исказиться, и стрелка будет показывать неверное направление. Чтобы этого избежать, лучше армировать дрон спокойно и сразу после взлёта лететь прямо от точки возврата с умеренной скоростью. Внимательно следите за Home Arrow — она должна быстро и точно указывать на дом.
Если стрелка Home Arrow будет показывать неверно в момент срабатывания failsafe, GPS Rescue сначала полетит в неправильном направлении, и вы рискуете потерять дрон.
Таким образом, регулярная проверка работы GPS Rescue и правильного направления Home Arrow перед полётом — ключ к безопасности и успешному возврату дрона.
Дрон летит не в том направлении в режиме спасения?
-
Режим GPS Rescue в Betaflight работает корректно даже без компаса — квадрокоптер определяет направление движения, анализируя данные GPS. При этом в начале полёта дрон может некоторое время «блуждать» или лететь в неправильном направлении, но со временем он должен сам скорректировать курс. При слабом GPS-сигнале коррекция может занять больше времени.
Если у вас установлен компас (магнитометр), и дрон в режиме Rescue летит не в ту сторону, возможно:
-
Компас неисправен или неправильно откалиброван.
-
В таком случае попробуйте отключить магнитометр в Betaflight и проверить работу Rescue снова. Если после отключения компаса дрон летит правильно, значит проблема именно в магнитометре
Если во время Rescue режим yaw (поворот) дергается или нестабилен, это может быть связано с низкой частотой обновления GPS (например, 1 Гц). Рекомендуется увеличить частоту обновления GPS до 5 или даже 10 Гц, если ваш модуль это поддерживает — это улучшит плавность и точность управления
:
-
Не запускайте полёт без GPS-фиксации и достаточного количества спутников (обычно минимум 8). Без фиксации дома GPS Rescue работать не будет
-
Разрешать арминг без GPS-фиксации можно только для тестов, но для реального использования Rescue требуется GPS-lock
-
Следите за качеством GPS-сигнала и при необходимости улучшайте приём (например, меняйте GPS-модуль или антенну)
Таким образом, GPS Rescue надёжно работает без компаса, но наличие исправного и правильно откалиброванного магнитометра улучшает точность и скорость коррекции курса. Если возникают проблемы с направлением, первым делом проверьте и при необходимости отключите магнитометр, а также убедитесь в высокой частоте обновления GPS.
-
Проверка точности GPS (HDOP/PDOP)
HDOP и PDOP — это показатели точности GPS, где более низкие значения означают лучшую точность.
-
HDOP (Horizontal Dilution of Precision) отражает точность по горизонтали — то есть по широте и долготе.
-
PDOP (Position Dilution of Precision) учитывает точность как по горизонтали, так и по вертикали (широта, долгота и высота).
В INAV используется HDOP, а в Betaflight начиная с версии 4.5 — PDOP.
Чтобы включить отображение PDOP в OSD, введите в CLI команду:
set osd_gps_sats_show_hdop = ON
-
— Отличная точность, очень стабильный GPS-фикс.
-
— Приемлемая точность, возможны небольшие дрейфы.
-
— Плохая точность, часто наблюдается значительный дрейф позиции.
-
Чем больше спутников подключено, тем ниже PDOP/HDOP и выше точность GPS.
-
Электромагнитные помехи, например, от камер GoPro, Wi-Fi и других электронных устройств, могут ухудшать PDOP/HDOP и вызывать нестабильность удержания позиции в режиме GPS Hold.
:
Для надёжной работы GPS и режима Rescue следите за значениями PDOP/HDOP — чем они ниже, тем лучше. При высоких значениях стоит проверить качество приёма спутников и минимизировать помехи.
Избегайте Softserial
Избегайте использования Softserial для режима GPS Rescue, так как он слишком медленный. Вы можете использовать его для отображения информации, связанной с GPS, на OSD, но он просто недостаточно надежен для GPS rescue. Лучше всего использовать аппаратный последовательный порт (любые выводы TX и RX на FC) и установить скорость передачи данных не менее 57600.
Нет GPS-сигнала
Помехи от электроники вашего квадрокоптера, такие как VTX, радиоприемники с телеметрией или даже провода, по которым протекает значительный ток, могут помешать вашему GPS получить фиксацию спутников. Если вы сталкиваетесь с трудностями при получении GPS-сигнала, выполните следующие шаги:
- Запитайте полетный контроллер (FC) через USB, чтобы проверить, питает ли он GPS-модуль. Если нет, переместите питание GPS-модуля на другой контакт на FC, который получает питание от USB.
- Изолируйте источник питания FC: питание только FC без VTX может помочь быстрее получить GPS-сигнал. Тем не менее, рекомендуется установить GPS как можно дальше от антенн VTX и RX, чтобы минимизировать возможные помехи.
- Экранирование проводов по которым протекает значительный ток, может снизить помехи. Эти провода могут действовать как антенны, потенциально мешая сигналу GPS.
Спутники GPS работают на двух частотах, L1 1575.42 МГц и L2 1227.60 МГц. Следовательно, настройка 1,3 ГГц может мешать вашему GPS. Большинство пилотов используют 5,8 ГГц, что обычно помогает избежать этой проблемы. Однако, учитывая слабый сигнал GPS от спутников — близкие источники радиосигналов могут вызывать помехи. Таким образом, размещение GPS-модуля подальше от любых источников передачи критично.
Прокладка проводов GPS под VTX может вызвать проблемы, особенно если VTX плохо экранирован. Этот RF-шум может нарушить работу GPS. Например, Avatar VTX V1 был известен своими проблемами с GPS, когда провода были проложены под ним. Возможное решение — заземление экранирования VTX. В качестве альтернативы экранирование проводов между GPS и FC и обеспечение их заземления может быть хорошим решением.
Не удается активировать GPS после обновления Betaflight
Если вы не можете включить GPS после прошивки последней версии Betaflight, возможно, некоторые функции, включая GPS, были исключены из скомпилированной прошивки — новая функция под названием Cloud Build System.
Чтобы проверить, является ли это проблемой, введите следующую команду в CLI:
feature gps
Если CLI ответит "gps not available", это означает, что функция GPS не была включена в прошивку вашего FC. Чтобы решить эту проблему, вам нужно перепрошить ваш FC и на этот раз убедиться, что опция GPS выбрана в системе Cloud Build во время компиляции.
Понимание точности GPS-координат
При отображении GPS-координат в OSD вы можете выбрать количество отображаемых десятичных знаков — в настоящее время доступны только 4 и 7 десятичных знака. Этот выбор напрямую влияет на точность определения местоположения на карте на основе данных GPS.
На странице "Decimal Degrees" в Википедии приведена подробная таблица, сравнивающая степень точности с физическим расстоянием:
| десятичных знаков | градусы | расстояние |
|---|---|---|
| 0 | 1 | 111 км |
| 1 | 0.1 | 11.1 км |
| 2 | 0.01 | 1.11 км |
| 3 | 0.001 | 111 м |
| 4 | 0.0001 | 11.1 м |
| 5 | 0.00001 | 1.11 м |
| 6 | 0.000001 | 11.1 см |
| 7 | 0.0000001 | 1.11 см |
| 8 | 0.00000001 | 1.11 мм |
Важно отличать точность от точности в этом контексте. GPS может отображать высокую степень точности (количество знаков), но не все десятичные знаки могут отражать истинную точность. Это означает, что хотя ваш GPS может сообщать координаты с очень высоким разрешением, фактическая точность — насколько эти координаты близки к реальному местоположению — может варьироваться.
- Как сделать Параметры и режимы Конспекты
- Воскресенье, 31 августа 2025