
Подключение сервопривода к FPV-дрону.
1. Подключение сервопривода к полётному контроллеру
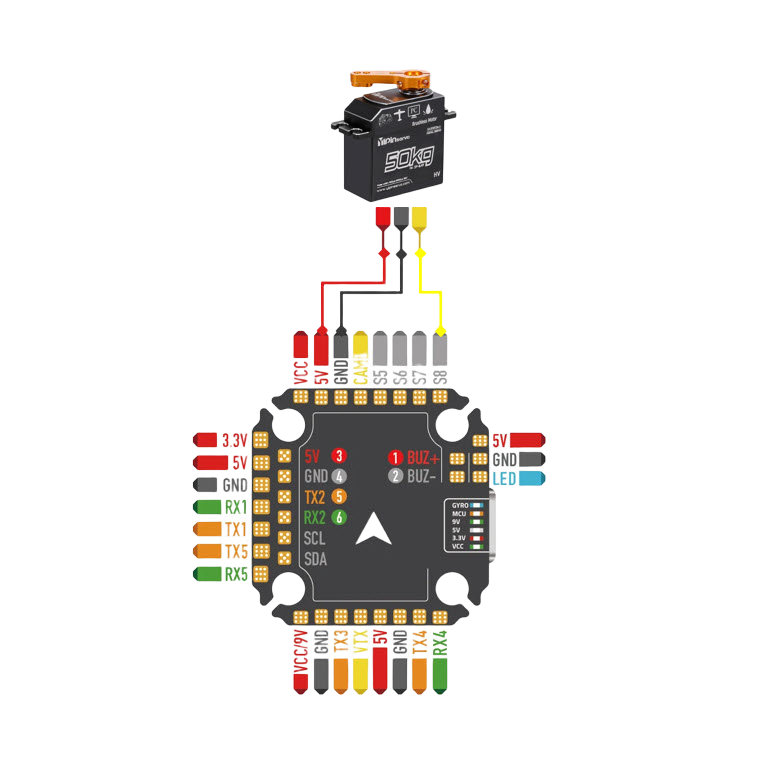
Сервопривод имеет три провода:
- Красный — питание
+5V
Если на вашем контроллере нет вывода питания 5V способного поддерживать работу сервопривода (необходимый ток), необходимо использовать внешний BEC (выносной модуль питания с понижением напряжения до 5 В). В этом случае питание сервопривода будет стабилизированным и безопасным.
Подключение напрямую к аккумулятору не рекомендуется!!!
- Коричневый/чёрный — земля
GND - Жёлтый/белый — управляющий сигнал
Signal
Подключите провода:
- Красный к площадке 5V на полётном контроллере.
- Коричневый к GND.
- Жёлтый к одной из свободных площадок для моторов (например, M5–M8) или сигнальных площадок S5–S8.
2. Настройка сервопривода в Betaflight Configurator
2.1. Подключение и запуск конфигуратора
- Подключите дрон к ПК через USB.
- Запустите Betaflight Configurator и выберите COM-порт.
- Нажмите Connect.
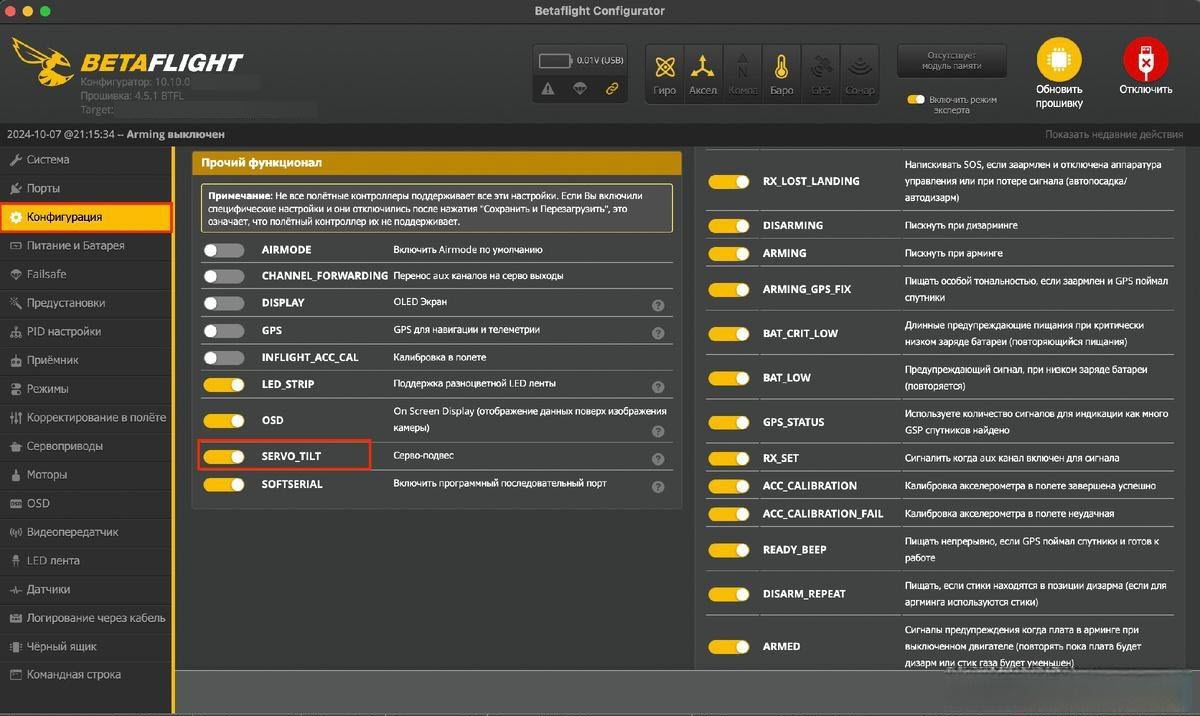
2.2. Включение поддержки сервопривода
- Перейдите во вкладку Configuration / Конфигурация.
- Включите опцию SERVO_TILT (или CHANNEL_FORWARDING для более гибкой настройки).
- Нажмите Save and Reboot.
2.3. Назначение пина для сервопривода
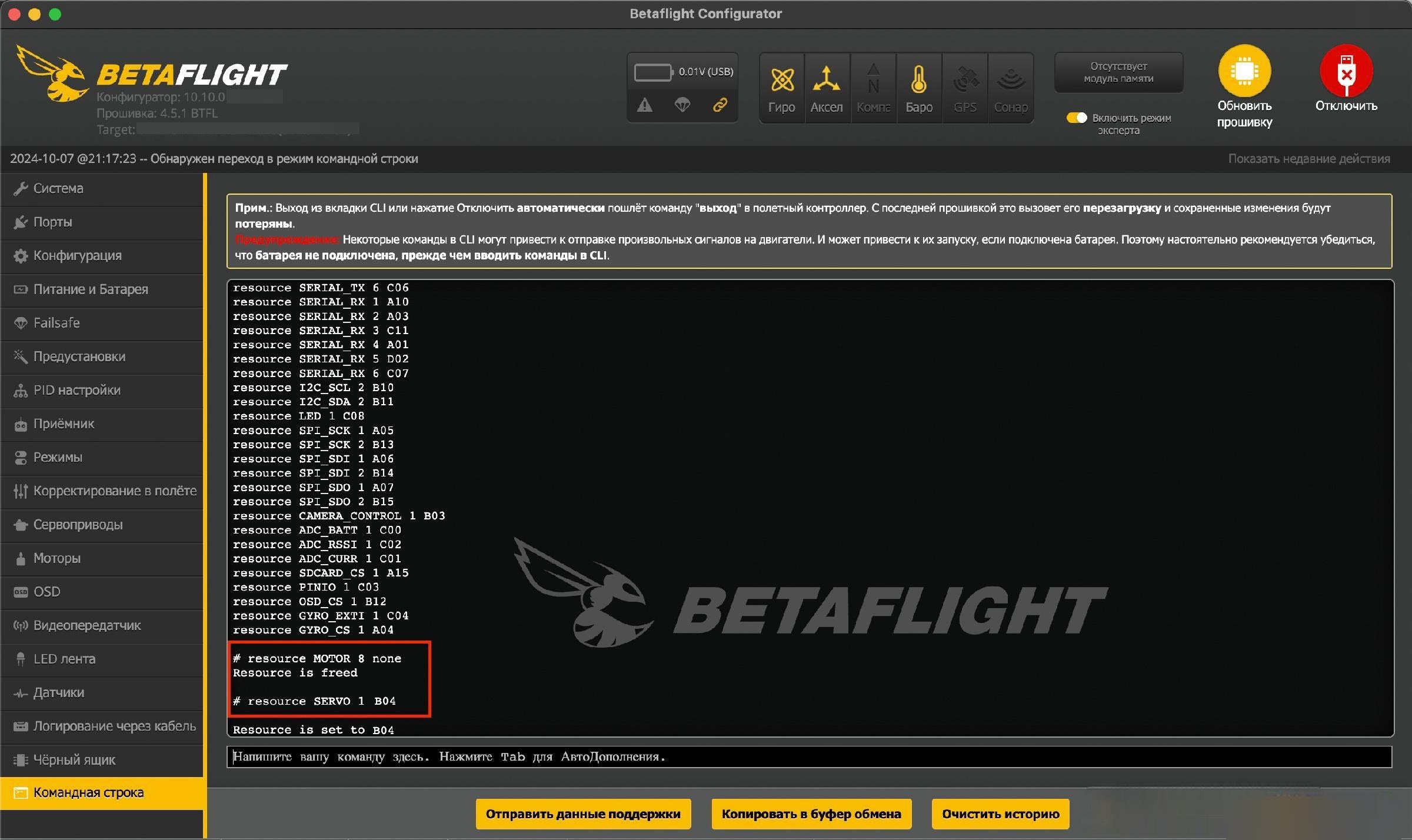
- Откройте вкладку CLI.
- Введите команду resource и найдите номер пина, к которому подключён жёлтый провод (например, M8 —
B04).
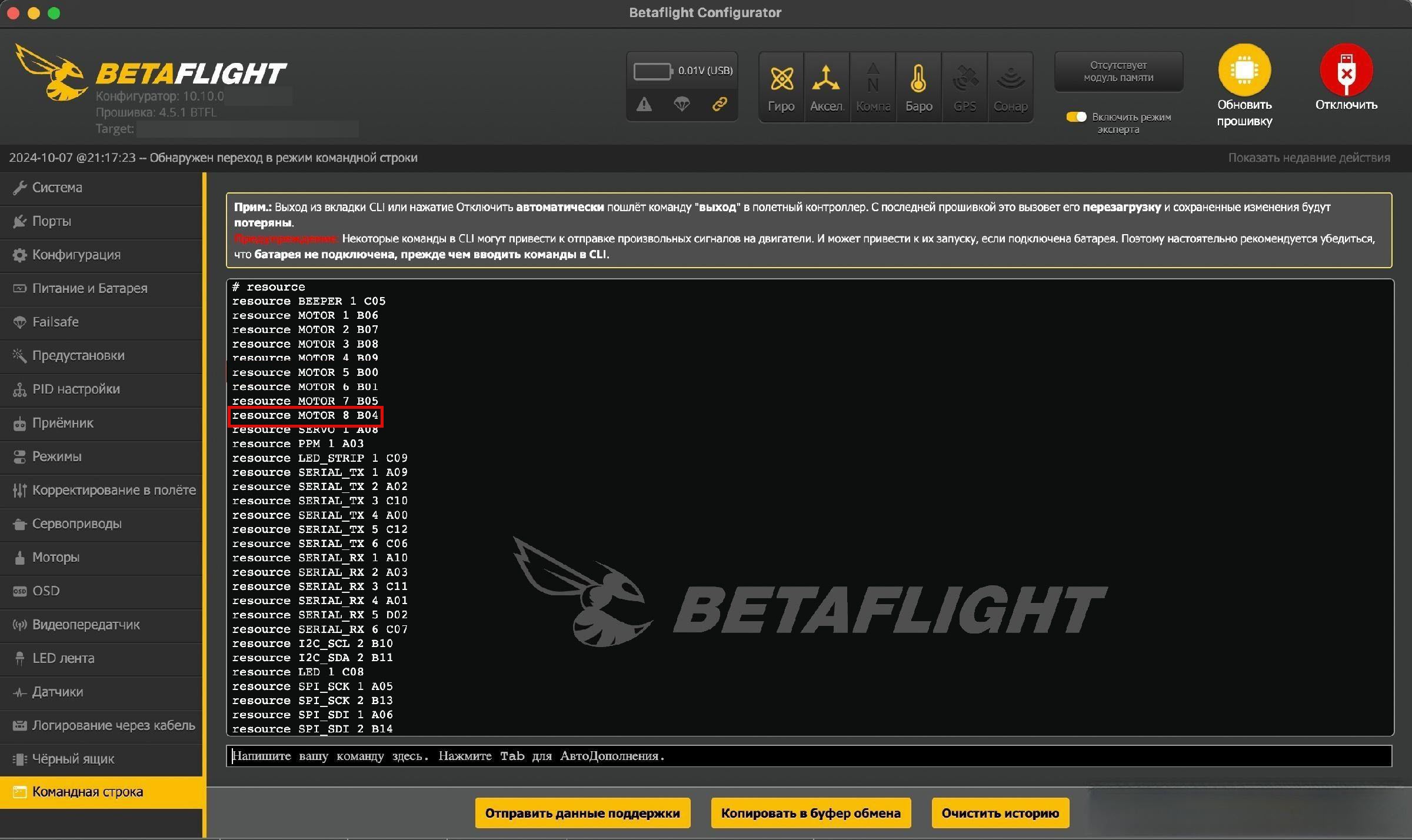
- Освободите пин:
resource MOTOR 8 none
- Назначьте пин
B04сервоприводу:resource SERVO 1 B04
- Сохраните изменения:
save
3. Настройка управления с аппаратуры
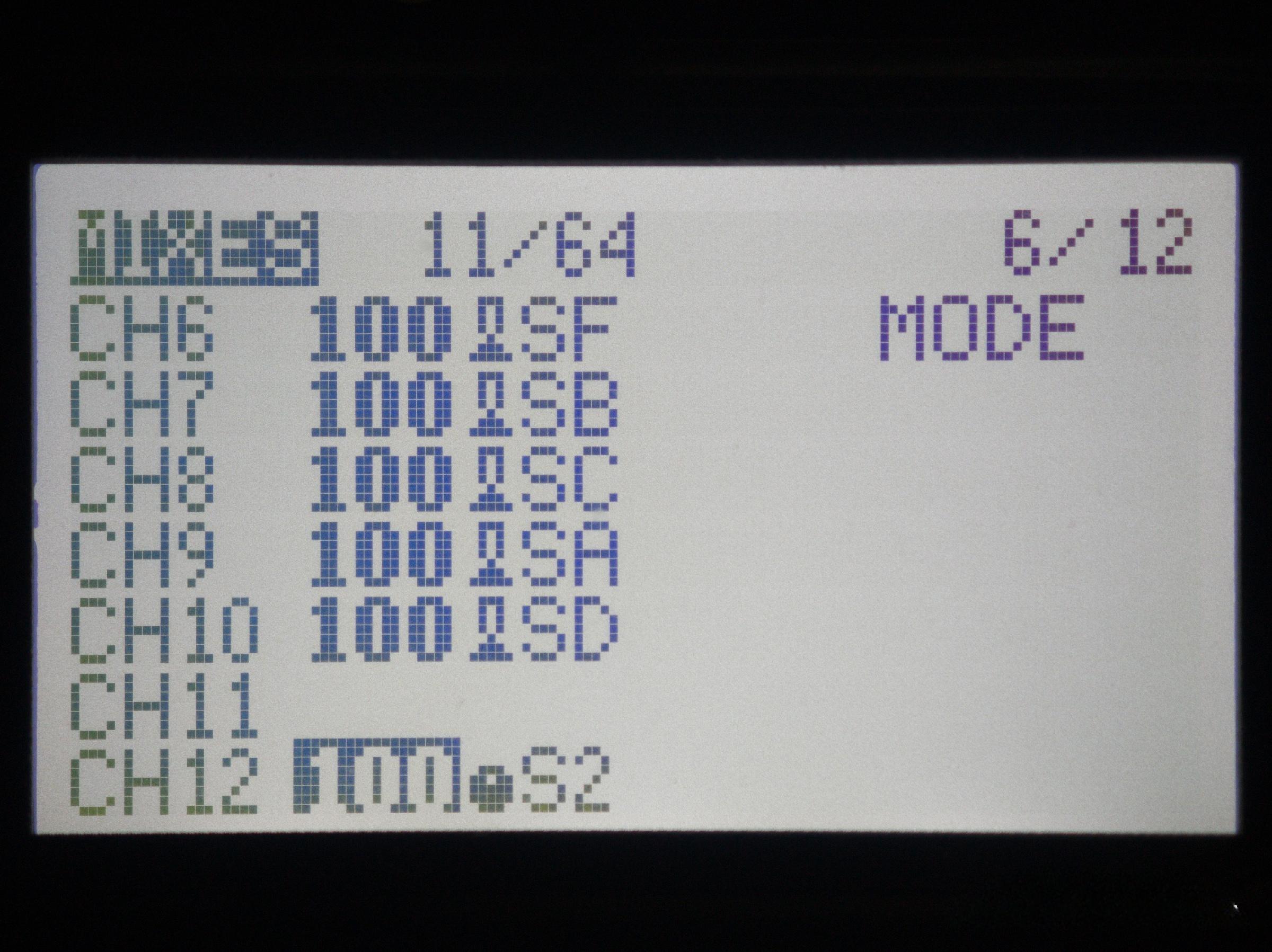
3.1. Привязка канала
- На аппаратуре выберите тумблер или крутилку, которой будете управлять сервоприводом.
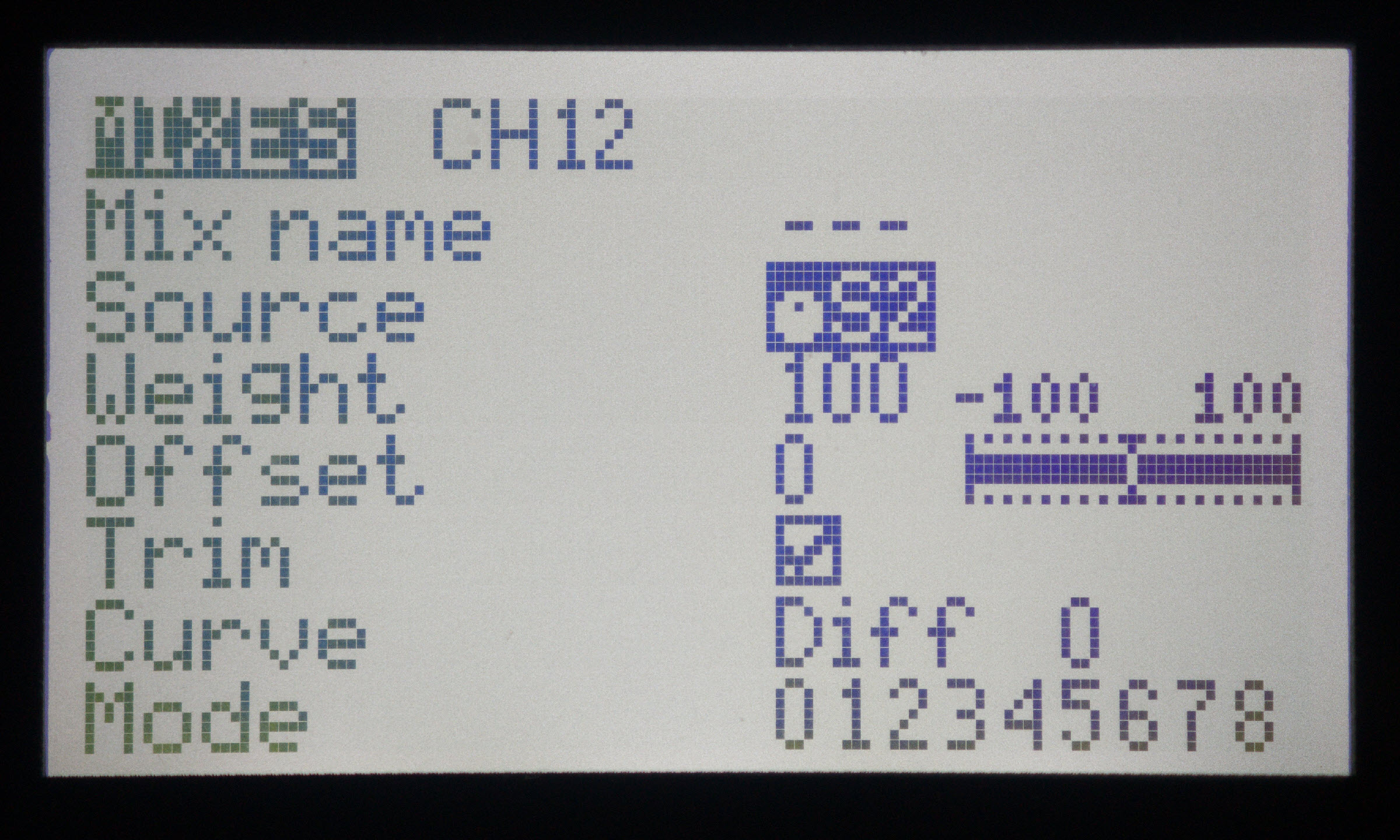
- В настройках микшера назначьте выбранный элемент на свободный канал (например, крутилка
S2на каналCH12).
Выбираем канал:
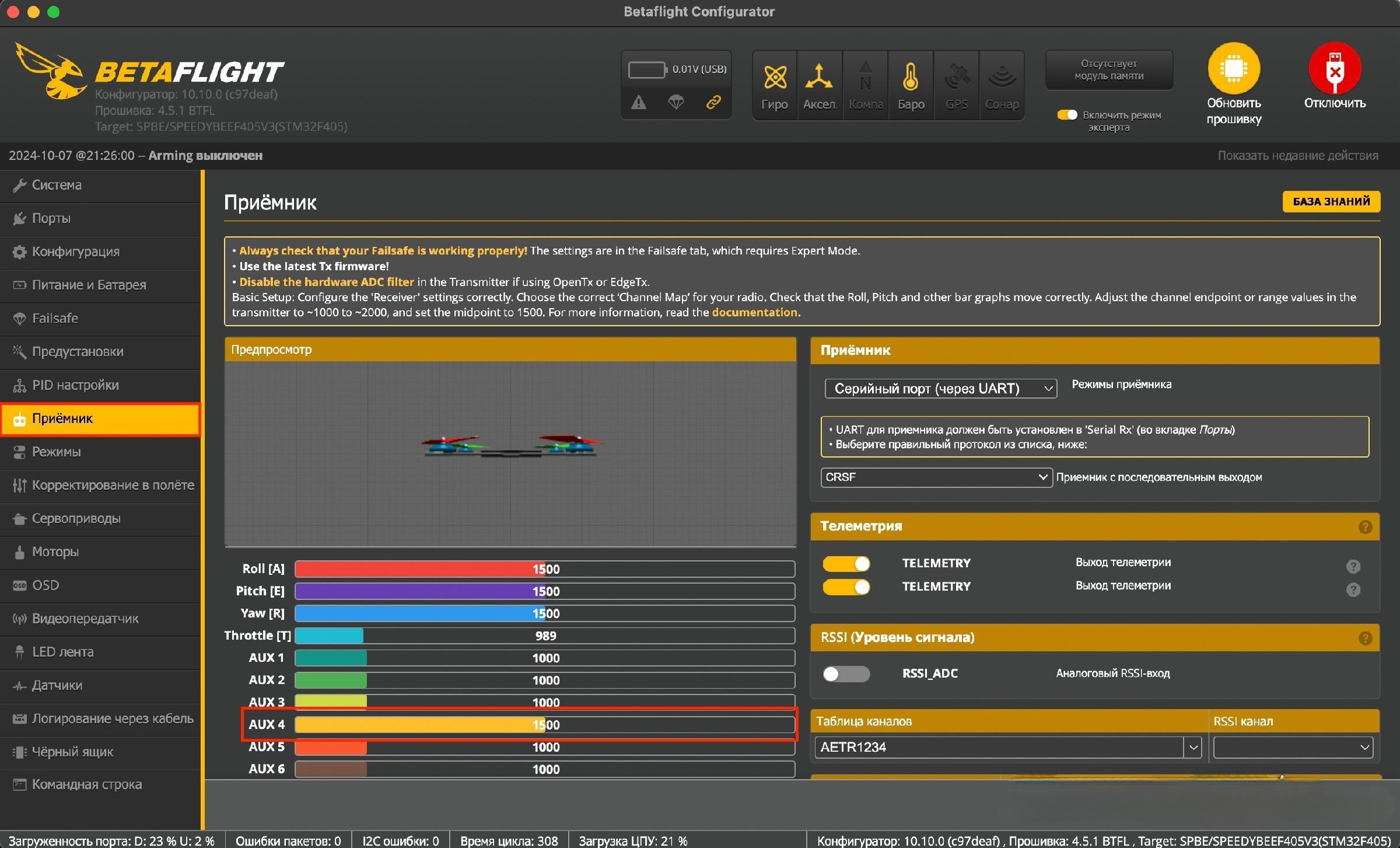
3.2. Проверка в Betaflight
- Перейдите во вкладку Receiver.
- Изменяя положение тумблера/крутилки, убедитесь, что соответствующий AUX-канал меняет значение.
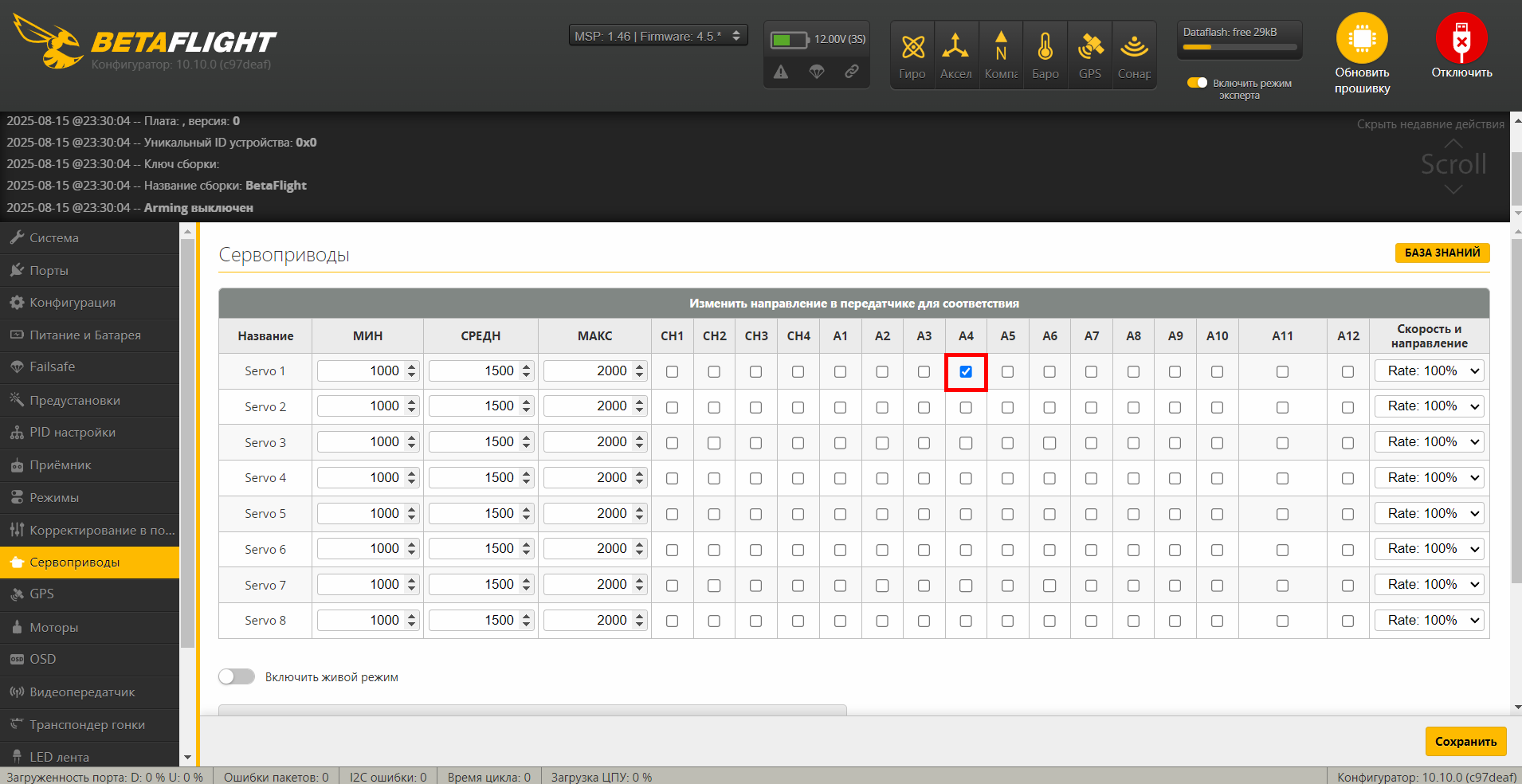
3.3. Привязка канала к сервоприводу
- Перейдите во вкладку Servos (или Modes в старых версиях).
- В строке
SERVO1поставьте галочку у нужного AUX (например, AUX4). - Сохраните изменения.
4. Проверка работы
- Перезагрузите дрон и подключите аппаратуру.
- Попробуйте изменить положение тумблера/крутилки — сервопривод должен реагировать.
Примечания
- Перед настройкой всегда делайте резервную копию настроек через CLI командой
diff allи сохраните файл. - Для сложных сценариев используйте функцию CHANNEL_FORWARDING для минимальной нагрузки на процессор.
- Все действия проводите с отключёнными пропеллерами для безопасности.
Эта инструкция подходит для большинства современных полётных контроллеров и версий Betaflight.
Дополнительная информация.
Этот урок — практический конспект для техников БПЛА: как корректно подключать сервоприводы к полётному контроллеру и настраивать их в Betaflight через переназначение ресурсов (CLI). В конце — практика, чек‑лист самопроверки и шпаргалка.
Главная мысль: сервопривод почти всегда подключается как GND + 5V + PWM(SIGNAL), а для стабильной работы критичны две вещи — правильное питание (не перегрузить BEC) и общая земля (common ground) между FC и источником питания сервы.
Содержание
- 1. Цели урока
- 2. Сервопривод на БПЛА: что это и где применяется
- 3. Электрика: провода, уровни сигналов, общая земля
- 4. Питание сервы: BEC FC vs внешний BEC, шумы DC‑DC
- 5. Подключение к полётному контроллеру: выбор выхода и пайка
- 6. Betaflight: включение servo, CLI resource remap, привязка AUX
- 7. Практика: типовые задачи (с решениями)
- 8. Чек‑лист самопроверки знаний + шпаргалка
1. Цели урока
- Понимать, как устроено подключение сервы:
GND,+5V,SIG(PWM). - Уметь выбрать питание: встроенный BEC FC или внешний BEC 5V, и объяснить почему.
- Уметь назначить серву на физический выход через Betaflight CLI:
resource MOTOR x none→resource SERVO n pin. - Уметь привязать управление к
AUX(тумблер/крутилка), настроить реверс и пределы хода. - Уметь диагностировать типовые проблемы: нет движения, дрожание, ребуты, помехи, неверный тип сервы (180°/360°).
2. Сервопривод на БПЛА: что это и где применяется
Сервопривод (servo) — исполнительный механизм, который по управляющему PWM‑сигналу либо занимает заданное положение (позиционная серва, типично 0–180°), либо вращается непрерывно (серва 360°, где PWM задаёт скорость/направление). На БПЛА сервы применяются в сбросах полезной нагрузки, приводах защёлок, механизмах наклона камеры и т.п.
Типовые режимы:
- Позиционная серва: PWM ≈ угол (например: 1000..2000 мкс → 0..180°)
- Непрерывная (360°): PWM ≈ скорость/направление (1500 мкс → стоп)Частая путаница: 180° vs 360°, PWM vs питание
5V) и управление (PWM) — разные цепи, их нельзя “лечить” одной настройкой.3. Электрика: провода, уровни сигналов, общая земля
3.1. 3 провода сервы и PWM‑управление
Сервопривод почти всегда имеет три провода: GND (земля), +5V (питание) и SIG (управляющий PWM). Управляющий PWM — это логический сигнал относительно земли. Поэтому общая земля обязательна, особенно если серва питается от отдельного источника.
Базовая распиновка (проверяйте по маркировке конкретной сервы):
- GND: коричневый / чёрный
- +5V: красный
- SIG: жёлтый / оранжевый / белый3.2. Типовые схемы подключения
Схема A: малая серва питается от FC (встроенный BEC 5V)
FC 5V ─────────── +5V (servo)
FC GND ─────────── GND (servo)
FC OUT(Mx) ─────── SIG (servo)Подходит, когда BEC FC выдерживает ток сервы с запасом и нет ребутов/просадок.
Схема B: серва питается от внешнего BEC 5V (рекомендуется для силовых серв)
BAT (через PDB/ESC) ──► IN внешнего BEC
BEC +5V ─────────────── +5V (servo)
BEC GND ─────────────── GND (servo)
FC GND ────────────────┘ (общая земля)
FC OUT(Mx) ──────────── SIG (servo)Ключевое: земля BEC и земля FC должны быть соединены (common ground).
3.3. Типичные ошибки
Ошибка: нет общей земли между FC и внешним питанием сервы
Симптомы: серва не двигается, двигается хаотично, дёргается, “живёт своей жизнью”. Исправление: соединить GND(BEC) и GND(FC), сделать провод земли коротким и надёжным.
Ошибка: перепутаны провода (особенно +5V и GND)
Симптомы: серва не включается, перегрев, возможный выход из строя сервы/платы. Исправление: сверить распиновку, промаркировать провода, прозвонить землю мультиметром.
4. Питание сервы: BEC FC vs внешний BEC, шумы DC‑DC
4.1. Как выбрать источник 5V
Выбор источника 5V — это вопрос надёжности. Встроенный BEC полётного контроллера не всегда рассчитан на высокие пиковые токи сервы, а сервы любят “пики” при рывке, упоре в механику и под нагрузкой.
Быстрый ориентир по решениям:
- Малая серва (простая механика, малые нагрузки): часто можно питать от 5V на FC.
- Силовая серва / “жёсткая” механика / частые упоры: внешний BEC 5V (с запасом по току).4.2. Рецепты по питанию и разводке
Рецепт: внешний BEC 5V + фиксация настроек
- Выставить выход BEC на
5.0V(или номинал, требуемый вашей сервой). - Если BEC регулируемый — зафиксировать подстроечник (капля клея/термоклей), чтобы вибрации не сдвинули настройку.
- Подключить
GND(BEC)кGND(FC)отдельным проводом (желательно).
Рецепт: снижение помех от DC‑DC
- Не располагать импульсный DC‑DC вплотную к приёмнику/антеннам и чувствительным трактам.
- Делать провод питания сервы коротким, силовые петли — минимальными.
- При проблемах со связью/видео: заменить неизвестный DC‑DC на качественный модельный BEC.
Импульсные преобразователи могут давать широкополосные помехи и “разносить” их не только излучением, но и по проводам питания.
4.3. Ошибки по питанию/помехам
Ошибка: питание мощной сервы от 5V BEC полётника без запаса
Симптомы: ребут FC/приёмника, пропадание управления, серва “проваливается” при нагрузке. Исправление: внешний BEC 5V (адекватный ток), общий GND, проверка просадок под нагрузкой.
Ошибка: импульсный DC‑DC рядом с RX → деградация связи
Симптомы: резко падает дальность/стабильность радиолинка, артефакты, “глухота” приёмника. Исправление: физически отнести DC‑DC, заменить на модельный BEC, переделать разводку земли/питания.
5. Подключение к полётному контроллеру: выбор выхода и пайка
Для Betaflight типовой способ — использовать свободный физический выход, который изначально размечен как моторный (M5, M6, M7, M8 и т.п.), и затем переназначить его на сервопривод через CLI. На практике это надёжно, повторяемо и не зависит от “магии” графического интерфейса.
Рекомендованный подход по железу:
1) SIG сервы паять на выбранный свободный выход (например, M7).
2) GND сервы паять на ближайший GND полётника.
3) +5V сервы:
- малая серва: можно взять 5V с FC,
- силовая серва: лучше взять 5V с внешнего BEC.5.2. Типичные ошибки монтажа
Ошибка: тест “только от USB”
Симптомы: серва не двигается или дёргается, хотя настройка верная. Причина: многие платы по USB не питают всю периферию как от основного питания. Решение: тестировать от основного питания (аккумулятор/БП) при снятых пропеллерах.
Ошибка: отсутствие механической разгрузки проводов
Симптомы: отрыв пятачков, переломы жил возле пайки, нестабильность после вибраций/ударов. Решение: термоусадка, стяжки, фиксация проводов на раме, изгибы делать на “живой” части провода (не прямо у места пайки).
6. Betaflight: включение servo, CLI resource remap, привязка AUX
6.1. Подходы: “как есть” vs переназначение ресурсов
В Betaflight физический пин может быть назначен на мотор, LED, buzzer и т.п. Чтобы использовать этот же пин как выход сервы, обычно применяют переназначение ресурсов (resource remap) в CLI.
# 1) Открыть CLI и посмотреть доступные ресурсы
help
resource
# 2) Найти строку вида (пример):
# resource MOTOR 7 B05
# 3) Освободить выход мотора
resource MOTOR 7 none
# 4) Назначить серву на тот же пин
resource SERVO 1 B05
# 5) Сохранить и перезагрузить
saveresource нет строк SERVO: это признак, что в текущей сборке/конфигурации прошивки servo‑функции недоступны. В этом случае применяют другую сборку/версию и повторяют проверку.Привязка управления к AUX (тумблер/крутилка)
После того как выход “стал сервой”, задача — назначить, каким каналом управлять: чаще всего выбирают свободный AUX (тумблер для 2 положений или потенциометр для плавного).
Алгоритм привязки:
1) Убедиться, что приёмник настроен и каналы AUX двигаются.
2) В разделе сервоприводов выбрать для SERVO 1 источник (например, AUX4).
3) Включить live‑режим (если доступно) и проверить движение сервы от аппаратуры.6.2. Частые ошибки в CLI и настройках
Ошибка: забыли save после remap
Симптомы: после перезагрузки всё “вернулось обратно”. Решение: после изменений ресурсов обязательно выполнить save.
Ошибка: назначили SERVO на неправильный пин
Симптомы: серва не двигается, хотя AUX назначен, питание есть. Решение: перепроверить resource, убедиться, что вы используете именно тот пин, который соответствует выбранному физическому выходу (M7/M6 и т.п.).
Ошибка: неверные пределы (endpoints) → серва упирается в механику
Симптомы: гул, перегрев, дрожание, повышенный ток, быстрый износ редуктора. Решение: уменьшить min/max PWM, правильно выставить центр (mid), обеспечить запас до механического упора.
7. Практика: типовые задачи (с решениями)
Практика рассчитана на “техничку”: результат должен быть проверяемым на столе. Во всех задачах тестируйте без пропеллеров.
7.1. Базовая настройка и проверка
Задача 1: Подключить малую серву к 5V FC и оживить от AUX
Условие: малая серва, питание 5V берёте с FC. SIG — на свободный моторный пятачок (например M7). Нужно добиться, чтобы серва двигалась от тумблера/крутилки.
Подключение:
- Servo GND -> FC GND
- Servo +5V -> FC 5V
- Servo SIG -> FC M7 (или другой свободный выход)
Проверка:
- Подать основное питание (не только USB)
- Убедиться, что AUX на аппаратуре двигается
- Назначить AUX на SERVO 1 в настройках сервоприводовЗадача 2: Проверить наличие servo‑ресурсов и сделать remap M7 → SERVO 1
Условие: выход физически используется как моторный. Нужно освободить его и назначить как SERVO 1.
# 1) Посмотреть ресурсы
resource
# 2) Найти соответствие MOTOR 7 -> PIN (пример: B05)
# resource MOTOR 7 B05
# 3) Освободить моторный выход
resource MOTOR 7 none
# 4) Назначить серву на тот же пин
resource SERVO 1 B05
# 5) Сохранить
save7.2. Питание от внешнего BEC и защита от помех
Задача 3: Подключить серву через внешний BEC 5V с общей землёй
Условие: серва силовая или есть подозрение на просадки/ребуты. Питание сервы — от внешнего BEC 5V. Управление — от FC.
Подключение:
- BEC IN -> BAT (через силовую шину/ESC/PDB)
- BEC +5V -> Servo +5V
- BEC GND -> Servo GND
- FC GND -> BEC GND (общая земля, желательно отдельным проводом)
- FC OUT -> Servo SIG
Проверка:
- При движении сервы FC не перезагружается
- Связь/видео не деградируют при включении/движении сервыЗадача 4: Найти источник помех (если связь “падает”) и локализовать проблему
Условие: после установки DC‑DC/внешнего питания сервы ухудшилась дальность/стабильность радиолинка. Нужно локализовать: питание/земля/расположение/шум.
План диагностики:
1) Физически отнести DC‑DC от RX/антенн (временно — хоть на проводах).
2) Убедиться в общей земле FC ↔ BEC.
3) Укоротить силовые провода, убрать большие петли.
4) Временно заменить DC‑DC на другой BEC (если есть) и сравнить.
5) Проверить: проблема есть только при движении сервы или даже при простом питании.7.3. Endpoints/реверс/центровка
Задача 5: Настроить реверс и пределы, чтобы серва не упиралась
Условие: серва двигается, но направление “не то” или она упирается в механику. Нужно сделать корректный реверс и выставить min/mid/max.
Алгоритм:
1) Выбрать где делать реверс:
- в аппаратуре (реверс канала AUX), или
- в настройках сервы/миксах (если у вас так принято).
2) Выставить центр (mid), чтобы в нейтрали механизм стоял правильно.
3) Подобрать min/max так, чтобы оставался запас до механического упора.
4) Проверить серву под нагрузкой (аккуратно): нет гула/дрожания/перегрева.8. Чек‑лист самопроверки знаний + шпаргалка
Отметьте пункты, которые вы действительно понимаете и можете применить без подсказок.
| ✓ | Навык | Проверка |
|---|---|---|
| Понимаю 3 провода сервы | Могу объяснить назначение GND, +5V, SIG(PWM) и показать это на разъёме/проводах |
|
| Понимаю требование общей земли | Могу правильно собрать схему с внешним BEC и доказать мультиметром, что земли общие | |
| Выбираю питание сервы | Могу аргументированно выбрать: питание от FC или внешний BEC (по рискам просадок/пиков тока) | |
| Понимаю, почему тест “только по USB” ненадёжен | Могу корректно организовать тест на столе: без пропов, с основным питанием | |
Умею читать вывод resource |
Могу найти соответствие “MOTOR x → PIN” и “SERVO n → PIN” |
|
| Умею делать remap выхода под серву | Могу выполнить: resource MOTOR x none → resource SERVO n pin → save |
|
| Умею привязать AUX к SERVO | Могу назначить управление на тумблер/крутилку и показать движение сервы в live‑режиме | |
| Умею настроить реверс и endpoints | Могу настроить min/mid/max так, чтобы серва не упиралась и не гудела | |
| Отличаю 180° от 360° | Могу по симптомам понять, что серва 360° (скорость от PWM), и объяснить, почему она “крутится” | |
| Умею локализовать помехи от DC‑DC | Могу предложить план: развести по физике, проверить земли/петли, заменить BEC, повторить тест |
Шпаргалка технику: “подключил — оживил — проверил”
1) Подключение (железо)
Всегда:
- Servo GND -> FC GND
- Servo SIG -> выбранный выход (обычно свободный Mx)
Питание:
- малая серва: Servo +5V -> FC 5V
- силовая серва: Servo +5V -> внешний BEC 5V, при этом GND(BEC) соединить с GND(FC)2) Betaflight (минимум команд)
# Проверка ресурсов
resource
# Освободить выбранный моторный выход
resource MOTOR X none
# Назначить серву на тот же пин (PIN берёте из вывода resource)
resource SERVO 1 PIN
# Сохранить
saveЕсли в resource нет SERVO — используйте другую сборку/версию, где servo‑ресурсы доступны.
3) Проверка на столе (быстро и безопасно)
- Снять пропеллеры.
- Подать основное питание (аккумулятор/БП), не полагаться только на USB.
- Убедиться, что AUX двигается (приёмник настроен).
- Назначить AUX на SERVO 1 и проверить движение.
- Выставить min/mid/max так, чтобы не было упора, гула и перегрева.
4) Быстрая диагностика по симптомам
Симптом: серва не двигается
- проверить 5V на серве
- проверить GND общий
- проверить resource remap + save
- проверить что тест не только от USB
Симптом: серва дёргается/гуляет
- общая земля
- помехи/шумный DC-DC
- плохая пайка/перелом провода
Симптом: ребут FC при движении сервы
- питание сервы вынести на внешний BEC 5V
- проверить просадки 5V, убрать упоры в механику
Симптом: “крутится всегда”
- серва 360° или неверные endpoints/нейтраль