 | iNav")
Вкладка Ports (Порты) | iNav
На этой вкладке осуществляется управление UART-портами и USB-портом полетного контроллера для связи с внешними устройствами.
Цель: Настроить «нервную систему» дрона, распределив датчики, приемники и периферию по физическим портам и выбрав корректные скорости и протоколы обмена данными.
Содержание
1. Обзор и главные правила
На этой вкладке осуществляется управление UART-портами (аппаратными последовательными портами) и USB-портом вашего полетного контроллера (FC).
Эти порты — «нервная система» дрона. Они используются для общения контроллера с внешними устройствами и датчиками, которые обычно припаиваются к плате или подключаются через разъемы. (Примечание: Другие типы подключений, такие как I2C для компаса/барометра, настраиваются на вкладке Configuration).
Настройки представлены в виде таблицы, где каждая строка — это отдельный физический UART или USB-порт. INAV поддерживает множество протоколов и скоростей передачи данных.
Главные правила (General Rules)
1. Никогда не отключайте ползунок "Data" (MSP) на порту USB VCP!
Это самое важное правило. Если вы выключите MSP на порту USB VCP, вы получите так называемый «софт-брик» (soft brick) — полетный контроллер перестанет соединяться с компьютером через USB-кабель.
Если это все же случилось, есть два пути решения:
- Если у вас (случайно или намеренно) был включен MSP на каком-то другом UART-порту, вы можете подключиться к контроллеру через внешний USB-TTL адаптер, подпаявшись к этому UART.
- Перевести контроллер в режим DFU (зажать кнопку BOOT на плате при подключении кабеля) и полностью перепрошить его. Внимание: при этом все ваши настройки будут стерты, и придется настраивать дрон с нуля.
2. Как работает UART (Провода)
Стандартный последовательный порт (UART) обеспечивает двустороннюю связь и обычно требует пару сигнальных проводов:
- TX (Transmit — передача)
- RX (Receive — прием)
- Плюс обязательные провода: GND (земля) и питание (5V/Vbat).
Итого: обычно к устройству идет 4 провода. Однако некоторые устройства используют только три провода (если им не нужна двусторонняя связь) или используют полудуплекс (half-duplex), когда данные идут в обе стороны по одному и тому же проводу.
Совет: Всегда сверяйтесь со схемой подключения (pinout/wiring diagram) вашего полетного контроллера.
3. Правило перекрестного подключения (TX -> RX)
Это классическая ошибка новичков.
- Контакт TX на полетном контроллере должен идти к RX на устройстве.
- Контакт RX на полетном контроллере должен идти к TX на устройстве.
(Аналогия: «Рот» одного должен быть напротив «Уха» другого). Если подключить TX к TX, устройство работать не будет.
4. Инвертированные протоколы (Inverted Serial): Это особая ситуация. Некоторые старые или специфические протоколы (например, SBUS от FrSky) используют «перевернутый» сигнал (где 0 — это 1, и наоборот). На современных контроллерах (F7, H7) это обычно не проблема, но если устройство не работает, стоит проверить, не требует ли оно подключения к специальному пэду (иногда обозначается как nTX или SBUS).
5. Скорость порта (Baud Rate): Устройство (например, GPS) и полетный контроллер должны «разговаривать» на одной скорости. Если в GPS модуле зашита скорость 38400, а в INAV вы поставите 115200 — они не поймут друг друга.
6. Одно устройство — один порт (Критично): На одной строке (одном UART) может быть активировано только одно устройство. Нельзя включить на UART1 одновременно и «Serial RX», и «GPS». Это недопустимая конфигурация. Если вы попытаетесь это сделать, INAV просто сбросит ваши настройки при сохранении.
2. Описание столбцов таблицы (Ports)
Identifier (Идентификатор)
Здесь перечислены доступные порты.
- USB VCP — это виртуальный порт (ваш USB кабель).
- UART1, UART2 и т.д. — физические порты на плате.
На заметку: На самой плате контроллера они могут быть подписаны сокращенно: R1/T1 (для UART1), RX2/TX2 (для UART2) и т.д. Если видите метку nR1 — это инвертированный вход.
Data (Данные / MSP)
Этот переключатель активирует протокол MSP (MultiWii Serial Protocol). Это «родной» язык общения INAV.
Где используется:
- Связь с конфигуратором (через USB).
- Bluetooth-модули для настройки с телефона.
- DJI VTX (для старых прошивок или OSD).
- Модули INAV Radar, Formation Flight.
- Некоторые модули RemoteID.
Совет: Хорошая практика — включить MSP на одном из свободных UART-портов (например, UART3 или 4). Если вы случайно сломаете USB-разъем (физически вырвете его при краше), вы сможете подключиться к контроллеру через этот запасной UART с помощью адаптера и спасти настройки.
Telemetry (Телеметрия)
Этот столбец отвечает за передачу данных ОТ дрона К пульту управления (напряжение батареи, GPS-координаты, высота и т.д.). Это позволяет настроить на пульте голосовые предупреждения (например, «Low Battery»).
Важный нюанс: Обычно телеметрия передается через приемник радиоуправления (RX).
- Случай А: Некоторые приемники (например, старые FrSky SmartPort) требуют для телеметрии отдельного провода и, следовательно, отдельного UART. В этом случае вы выбираете протокол телеметрии в этом столбце, и этот UART больше ничем занимать нельзя.
- Случай Б (Современный): Протоколы типа TBS Crossfire, ExpressLRS (ELRS), Ghost, FPORT передают телеметрию внутри основного канала управления. Им НЕ НУЖНО включать ничего в столбце Telemetry.
RX (Приемник радиоуправления)
Включите этот переключатель (Serial RX) напротив того UART, к которому припаяны провода от вашего приемника.
Важно: Здесь вы просто указываете порт («Мой приемник на UART2»). Сам протокол (SBUS, CRSF, ELRS, IBUS) выбирается на другой вкладке — Receiver.
Не забудьте нажать Save перед переходом на другую вкладку!
Типы подключений RX:
- SBUS: Передает данные только в одну сторону. Требует подключения к RX-паду (часто инвертированному).
- CRSF / ELRS: Двусторонняя связь. Используют полноценную пару: TX контроллера -> RX приемника, RX контроллера -> TX приемника.
- FPORT / Half-duplex: Используют один провод, обычно подключаются к TX-паду контроллера.
3. Сенсоры, периферия и пример
Sensors (Датчики)
В основном этот столбец используется для GPS-модулей.
- Выберите «GPS» в выпадающем списке напротив нужного порта.
- Скорость: Если GPS не работает, попробуйте менять скорость. Стандартные: 9600, 38400, 57600 или 115200. Начните с меньшей, если есть проблемы.
Peripherals (Периферия)
Здесь настраивается управление видеопередатчиками (VTX) и камерами.
Основные варианты:
- TBS SmartAudio / IRC Tramp:
- Используется для аналоговых видеопередатчиков.
- Позволяет менять канал и мощность видео через меню OSD (стиками пульта).
- Подключение: Один провод от VTX (обычно аудио/data) идет к TX-паду свободного UART.
- MSP DisplayPort: Используется для современных цифровых систем (Walksnail Avatar, HDZero, WTFOS). Позволяет выводить OSD (буквы и цифры) прямо в HD-картинку.
- DJI FPV VTX: Для систем DJI Air Unit, Caddx Vista, O3 (если не используется MSP DP).
- Runcam Device: Для управления настройками FPV-камеры (яркость, контраст) через контроллер.
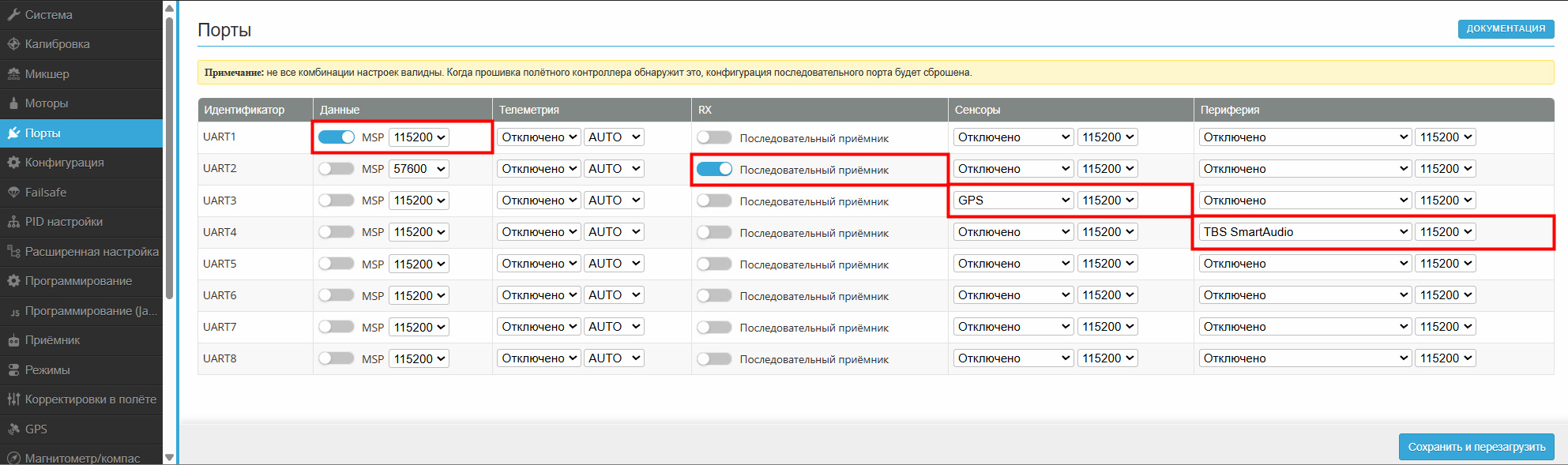
Пример конфигурации (Example)
Внимание: Это лишь абстрактный пример, у вас порты будут другими!
| Identifier | Data | Telemetry | RX | Sensors | Peripherals |
|---|---|---|---|---|---|
| USB VCP | MSP (ВКЛ) | Disabled | OFF | Disabled | Disabled |
| UART1 | Disabled | Disabled | Serial RX (ВКЛ) | Disabled | Disabled |
| UART2 | Disabled | Disabled | OFF | GPS | Disabled |
| UART3 | Disabled | Disabled | OFF | Disabled | TBS SmartAudio |
Разбор примера:
- USB: MSP включен (чтобы работал конфигуратор). Не оключать!
- UART1: Сюда припаян приемник (например, ELRS или Crossfire).
- UART2: Сюда подключен GPS-модуль.
- UART3: Сюда подключен провод управления аналоговым видеопередатчиком (SmartAudio).
Чек-лист перед сохранением (Save and Reboot):
- MSP на USB не выключен.
- На одну строку (UART) назначено только одно устройство.
- Номер UART в таблице совпадает с тем, куда физически припаяны провода.
- Правило TX -> RX соблюдено.
ID 358